无人机载紧凑型PGP自校正可见近红外成像光谱系统设计
版权申诉
118 浏览量
更新于2024-06-27
收藏 2.97MB DOCX 举报
本文档主要探讨了基于PGP型(Prism-Grating-Prism)的自校正成像光谱仪系统设计与研究。在无人机(UAV)载荷高光谱成像技术日益重要的背景下,针对当前成像系统存在的技术挑战,设计者提出了一种创新的解决方案。系统的核心是将成像光谱仪与面阵相机集成在一个共同的光学路径中,这不仅提高了系统的紧凑性,还简化了硬件配置。
面阵相机的高帧频特性被充分利用,通过实时处理图像数据,可以精确地反演出相机在空间中的位置和姿态参数。这种实时定位技术对于确保高光谱图像的几何校正至关重要,使得图像在空间上的一致性得以保障,从而提升影像的准确性和可靠性。
设计的系统工作波段覆盖可见近红外区域,即400至1000纳米,具有43.6°的宽视野在幅宽方向,而飞行方向的视野为20.0°,这样的设计考虑到了应用环境下的各种角度需求。系统焦距设置为13毫米,光谱分辨率达到了非常优秀的2.5纳米,这意味着能够获取到极高分辨率的光谱信息,这对于地球观测、环境监测和遥感等领域有着显著的优势。
PGP型设计在文中被重点提及,它作为一种成本效益高的光学方案,提供了轻量化且资源利用率高的优势。通过ZEMAX软件进行深入的光学设计和分析,确保了整个系统的光学性能达到最优。这一软件在设计过程中扮演了关键角色,帮助优化了系统的整体性能,并可能涉及到复杂的光学模拟和仿真计算。
总结来说,这篇文档详细介绍了如何通过集成设计、实时参数反演和高精度校正技术,构建出一个紧凑型的、高性能的成像光谱仪系统。这种系统在解决无人机载荷高光谱成像仪的技术问题上取得了突破,为相关领域的科研和应用提供了新的可能性。
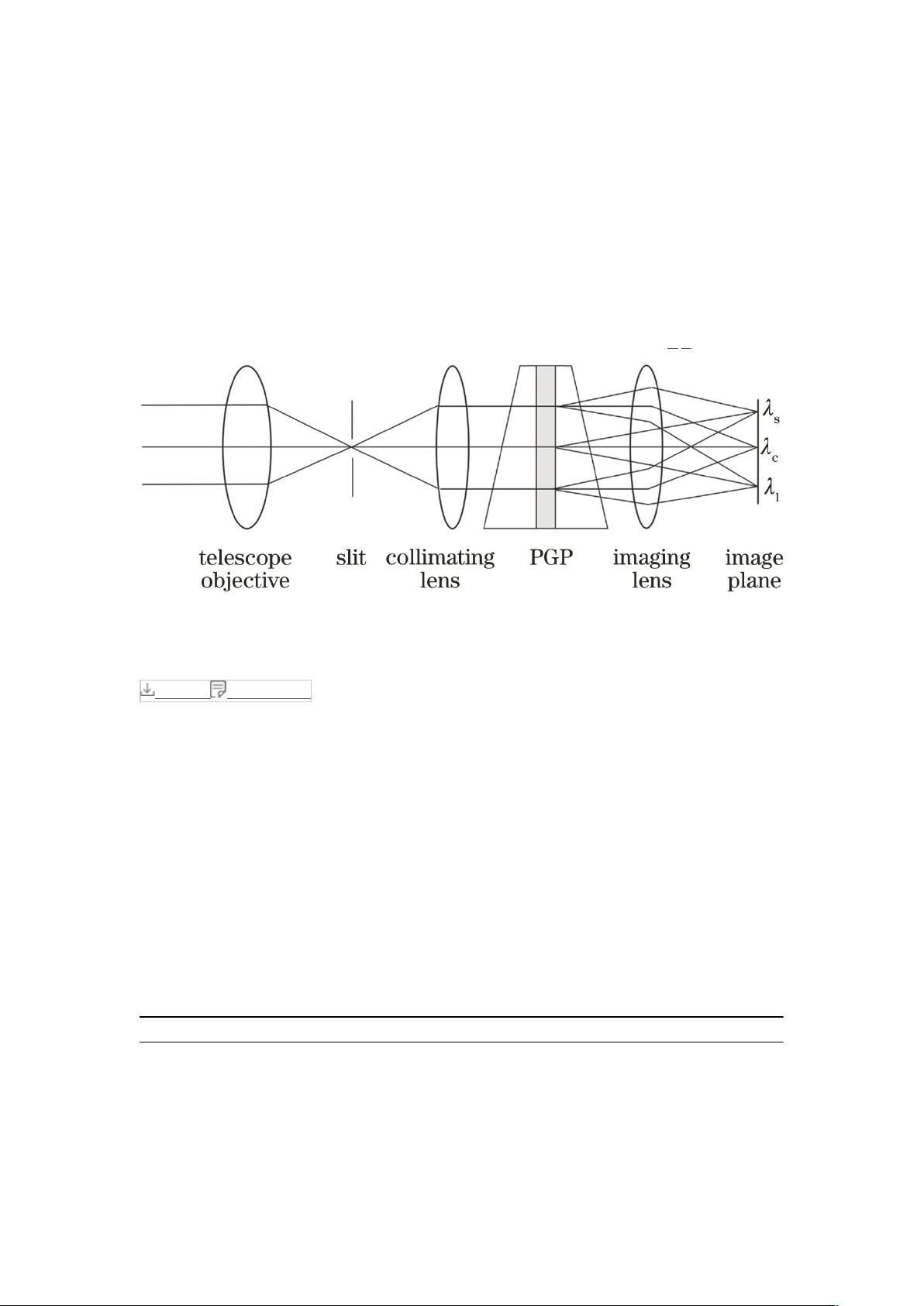
构紧凑的分光器件。PGP 结构中成像光谱仪的工作原理如图 3 所示,从左到右依次为狭
缝、准直透镜、PGP 分光元件、聚焦透镜和光谱面。成像镜头将目标成像于狭缝上,进入
光谱仪的光束首先经过准直物镜准直为平行光,再入射到 PGP 结构的第一块棱镜上,其中
λ
s
、λ
c
和 λ
l
分别为最短波长、中心波长和最长波长。不同波长的光以不同的角度入射到体
相全息光栅上,经过光栅分光后通过第二块棱镜,一级衍射的中心波长的光被偏折回光轴,从
而实现光路共轴,最后经过成像物镜成像在探测器的焦平面上。这种管状直视(同轴)结构使
得系统在空间和光谱方向上均具有较低的几何像差,进一步保证了光学性能
[12-14]
。
图 3. PGP 结构成像光谱仪的工作原理
Fig. 3. Working principle of PGP structure imaging spectrometer
下载图片 查看所有图片
2.3 设计指标
系统的光谱范围为 400~1000 nm,探测器选用 BASLER 公司生产的 CMOS-acA2040-
25gmNIR,像元大小为 5.5 μm×5.5 μm,分辨率为 2048 pixel×2048 pixel,量子效率(典型)为
61.9%。可用区域大小为 11.2 mm×11.2 mm,光栅选用 Wasatch 透射型体相全息光栅,每 1
mm 的宽度有 360 条刻线,衍射级次为+1 级,PGP 光谱仪实现 1∶1 成像,狭缝长度为 11
mm,望远物镜的焦距为 13 mm,F 数为 2.5,主要的技术指标如表 1 所示,其中 NA 为数值孔
径。
表 1. 设计系统的技术指标
Table 1. Technical specifications of designed system
Specification
Value
Focal length /mm
13
F-number
2.5
Field of view /[(°)×(°)]
43.6×20.0
Focal length of imaging objective /mm
40
剩余17页未读,继续阅读
2022-05-31 上传
2023-11-30 上传
2022-07-09 上传
177 浏览量
2022-10-28 上传
2021-12-08 上传
116 浏览量

罗伯特之技术屋
- 粉丝: 4525
 我的内容管理
展开
我的内容管理
展开







最新资源
- Vue.js基本语法及其特性与扩展插件解析
- 黑白风格企业PPT模板下载
- 起亚概念车电脑主题XP版:科技与美学的融合
- 智能设备远程管理新体验:永红爱控软件v1.0.0515.11.21
- 自制恩智浦智能车带按键OLED显示屏编程教程
- ADS_Calculator: 掌握后缀表达式计算
- NISO2021大会:深入探讨JavaScript技术发展
- Java语言压缩包子文件管理与使用教程
- 掌握音乐同步魔法:TomorrowMusic让生活更有旋律
- 儿童钢琴兴趣班PPT模板免费下载
- 绿豆蛙xp主题:可爱桌面主题的完美呈现
- C++项目开发:POSGSOFT第一个项目分析
- Teorex.Inpaint 8.1:便捷的Windows去水印软件
- 猪拉丁翻译器:掌握Pig Latin语言转换技巧
- UI开发必备:MCU字体字库制作软件介绍
- simple-log-analyzer:打造高效Log4J日志解析到数据库解决方案
