TwinCAT NC PTP教程V2.0:伺服驱动自动化秘籍
需积分: 16 50 浏览量
更新于2024-07-16
收藏 19.21MB PDF 举报
TwinCAT NC PTP实用教程V2.0是一份针对德国BECKHOFF公司发布的基于PC的运动控制软件TwinCAT NC的专业指南。这份教程适用于2014年,旨在帮助新手理解和掌握TwinCAT NC在工业自动化领域的应用。教程的核心内容围绕以下几个方面展开:
1. **背景介绍**:21世纪初,中国制造业迅速崛起,对提高生产效率的需求促使伺服驱动系统在产业机械中的广泛应用。伺服驱动系统以其高精度和良好的动态性能优于传统驱动方式,如气缸、变频电机和步进电机。
2. **控制方式**:控制伺服驱动器和电机有三种常见方法:使用制造商的软件工具(A),独立运动控制系统(B)可以控制不同品牌设备,以及通过PLC厂家的运动控制系统(C)。TwinCAT NC的独特之处在于它结合了B和C的优点,实现了NC(Numerical Control)与PLC(Programmable Logic Controller)的无缝集成。
3. **功能特性**:TwinCAT NC支持多种伺服驱动器接口,包括脉冲、模拟量、现场总线和以太网,赋予用户在设备选择上的灵活性。此外,它允许开发者在不依赖特定硬件的情况下进行程序模拟和调试,通过BECKHOFF的ScopeView软件,用户可以实时监控系统变量。
4. **作者经验分享**:作者Lizzy Chen,作为BECKHOFF的技术专家和培训师,积累了丰富的实践经验。书中详细讲解了TwinCAT NC的工作原理、软件模型,并汇集了实际应用中的知识要点和操作步骤,附带章节示例程序,便于读者深入学习和实践。
5. **适用范围**:这份教程不仅适用于工业自动化工程师,也对希望了解和利用TwinCAT NC进行运动控制的开发人员和技术人员极具价值,无论他们是刚入门的新手还是寻求技术提升的专业人士。
TwinCAT NC PTP实用教程V2.0提供了一个全面而实用的平台,帮助用户理解和掌握这一强大的运动控制软件,以提升产业机械的自动化水平和生产效率。
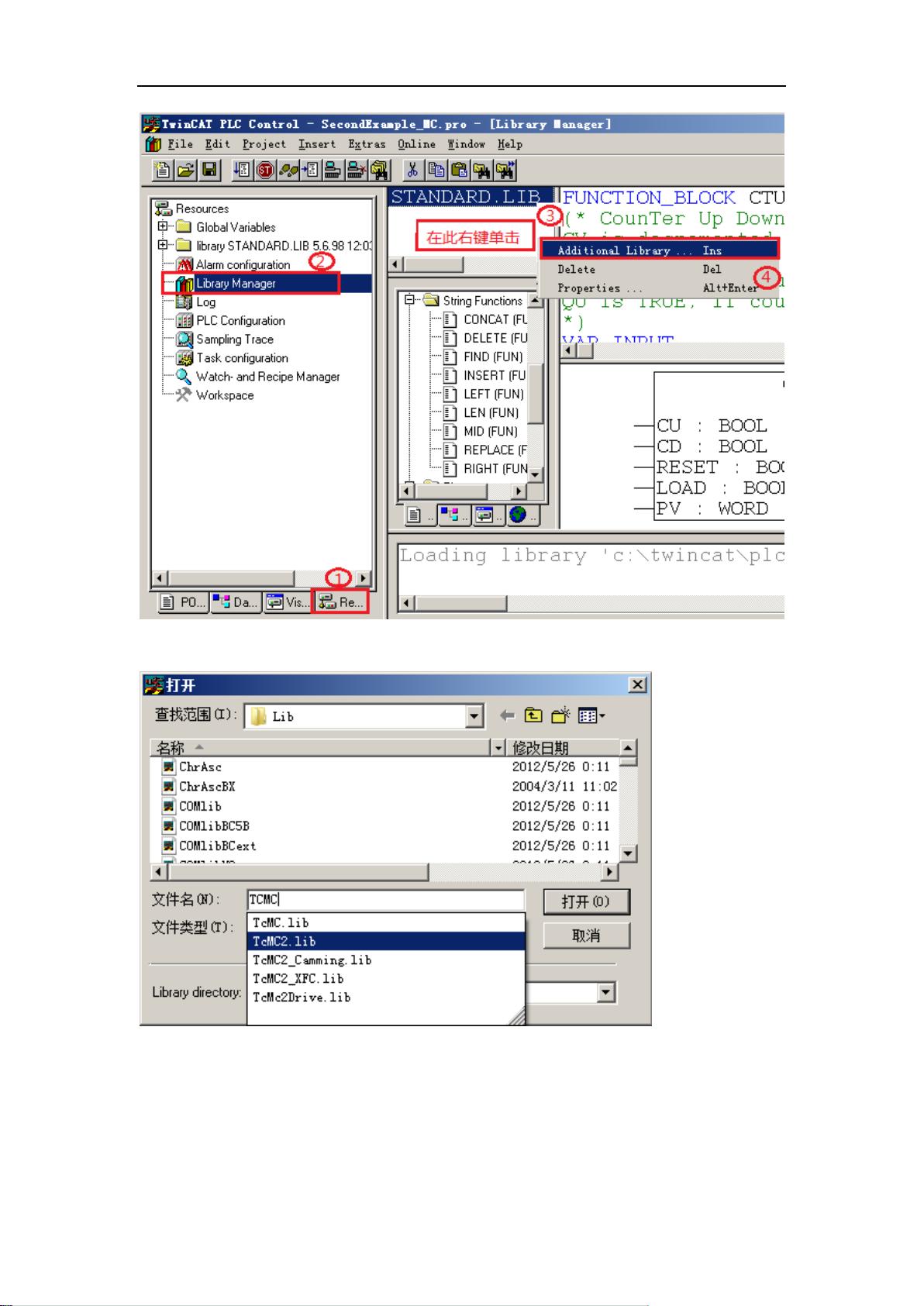
TwinCAT NC PTP 实用教程 V2.00 第 2 章 开发第一个运动控制的项目
第 613 页 共 1111 页 2013-12-24
本文纯属个人经验,非 Beckhoff 公司正式发行,如有疑问,请直接联系作者:BCGZ Lizzy Chen
第七步:保存文件。
剩余366页未读,继续阅读
2019-02-13 上传
2015-10-13 上传
2015-06-08 上传
2018-07-24 上传
2018-01-12 上传
2019-07-31 上传
2019-12-20 上传

lyz820307
- 粉丝: 3
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
