飞思卡尔智能车竞赛:电磁组直立行车设计方案
需积分: 12 103 浏览量
更新于2024-07-26
2
收藏 2.55MB PDF 举报
"该文档是关于第七届全国大学生‘飞思卡尔’杯智能汽车竞赛电磁组直立智能车的设计方案,涵盖了直立控制、速度控制、方向控制等关键技术和硬件、软件设计。"
在这个直立智能车的设计方案中,首先提到了比赛的要求,即电磁组的车模需要直立行走,模仿两轮自平衡电动车的行进模式,这与传统的四轮车模比赛相比,对车辆的稳定性和控制算法提出了更高挑战。方案旨在帮助参赛者理解并实现这一复杂的任务。
在**原理篇**中,详细介绍了以下几个方面:
1. **直立行走任务分解**:这个部分可能涉及到如何将车模保持直立行走的任务分解为更小的控制问题,如平衡控制、动态稳定性等。
2. **车模直立控制**:这部分讲解了如何通过传感器和控制系统确保车模保持直立,可能包括倾角测量、反馈控制等技术。
3. **车模速度控制**:讨论了如何精确地控制车模的速度,这可能涉及到PID控制器或其他控制算法的应用。
4. **车模方向控制**:这部分讲述了如何实现车模的转向,可能包括基于电机的独立驱动或差速控制策略。
5. **车模倾角测量**:介绍了使用何种传感器(如陀螺仪或加速度计)来实时监测车模的倾斜角度。
6. **车模直立行走控制算法总图**:提供了整个控制系统的架构和算法流程,帮助理解各个部分如何协同工作。
在**电路设计篇**,文档可能涵盖了以下内容:
1. **整体电路框图**:展示了所有电子组件的连接方式,包括微控制器、传感器、驱动电路等。
2. **DSC介绍与单片机最小系统**:描述了如何选择和配置数字信号控制器(DSC),以及构建基本的微控制器系统。
3. **倾角传感器电路**:详述了倾角传感器的接口和信号处理。
4. **电机驱动电路**:说明了如何设计和搭建电机的驱动电路,以实现精确的转速和方向控制。
5. **速度传感器**:介绍了如何安装和使用速度传感器来监测车模速度。
6. **电磁线检测电路**:可能涉及到赛道上的电磁线检测,用于引导车模行驶。
**机械设计篇**可能包含车模的结构改造和传感器安装,以及需要注意的问题,以保证车模的稳定性和性能。
**软件编写与调试篇**则可能涵盖了软件框架、DSC的资源配置、主要算法的实现、程序调试和参数优化,以及现场测试的流程。
最后,方案还包含了结束语和附录,为参赛者提供了全面的参考资料和实践经验。
这份设计方案提供了电磁组直立智能车从理论到实践的全面指导,对于理解智能车控制原理和实际操作具有很高的价值。
9
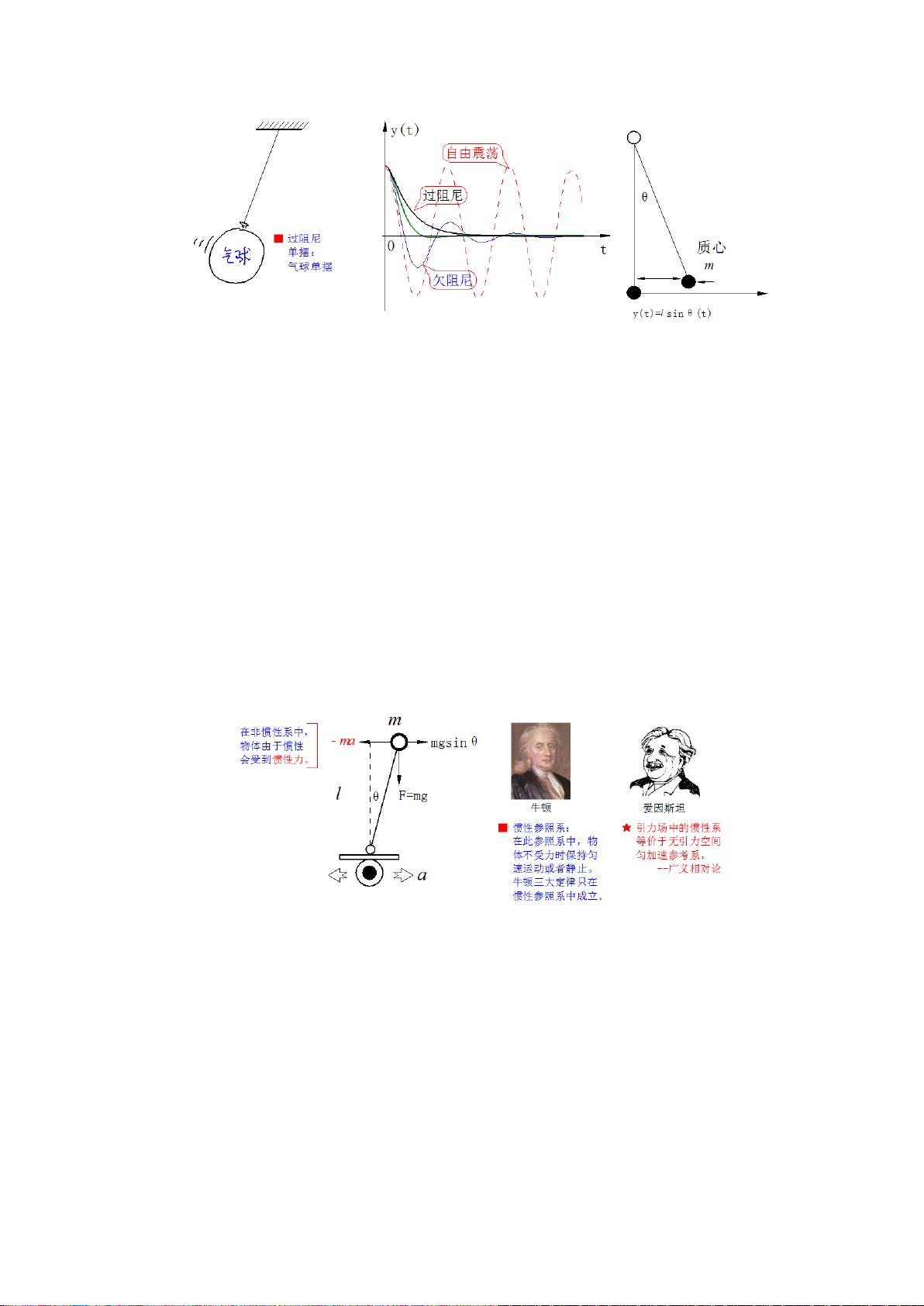
图 2.7 单摆在不同阻尼下的运动情况
总结单摆能够稳定在垂直位置的条件有两个:
(1) 受到与位移(角度)相反的恢复力;
(2) 受到与运动速度相反的阻尼力。
如果没有阻尼力,单摆会在垂直位置左右摆动。阻尼力会使得单摆最终停止在
垂直位置。阻尼力过小(欠阻尼)会使得单摆产生震荡,阻尼力过大(过阻尼)会
使得单摆到达平衡位置时间拉长。存在一个阻尼临界阻尼系数,使得单摆最快稳定
在平衡位置。
为什么倒立摆在垂直位置时,在受到外部扰动的情况下,无法保持稳定呢?分
析倒立摆的受力,如图 2.8 所示。
图 2.8 在车轮上参照系中车体受力分析
倒立摆之所以不能象单摆一样可以稳定在垂直位置,就是因为在它偏离平衡位置的
时候,所受到的回复力与位移方向相同,而不是相反!因此,倒立摆便会加速偏离垂直
位置,直到倒下。
如何通过控制使得倒立摆能够像单摆一样,稳定在垂直位置呢?要达到这一目的,
只有两个办法:一个是改变重力的方向;另一个是增加额外的受力,使得恢复力与位移
方向相反才行。由此,能够做的显然只有第二种方式。

剩余47页未读,继续阅读
629 浏览量
518 浏览量
2021-10-10 上传
108 浏览量
113 浏览量
368 浏览量
2021-09-09 上传

wjshuibing
- 粉丝: 0
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- matlab代码sqrt-DynamicDRP:地球类中的流体和流动
- C++ GUI Qt4 code.rar
- 基于MATLAB的DFE频域均衡误码率仿真+代码仿真操作视频
- 黑苹果macOSCPU睿频检测工具CPU-S下载-CPU-S-master
- 谐波合成法-matlab程序文件
- My-leet-code-codewars-Hackerrank-Solutions:这些是我对代码挑战的一些解决方案
- React-Portfolio:我的投资组合,但是有React
- matlab代码sqrt-admmDSM:admmDSM
- 四星电子 SC-10拨号软件.zip
- C++职工管理系统编写
- 手写连笔王驱动sn217336 免费版
- GoHobby:NativescriptAngularTypeScript MobileApp,用于为那些试图寻找新的人群来做他们感兴趣的活动的人们计划兴趣活动
- kicad_rtl_cohere:用于RTL-SDR一致性项目的KiCAD项目
- 专业 PDF 编辑器 InfixPro PDF Editor 7.6.0.0 中文免费版.zip
- 信用卡欺诈检测
- 菲涅尔圆孔衍射matlab仿真+代码仿真操作视频
