"高精地图匹配定位算法及其在自动驾驶算法中的应用"
155 浏览量
更新于2023-12-28
收藏 1.78MB PDF 举报
高精地图的匹配定位算法是自动驾驶和智能车辆领域的重要研究方向。这些算法的主要目的是通过将车辆当前位置与高精地图进行匹配,从而实现精确定位和导航。在现有的研究文献中,基于优化和基于滤波的方法是两种常见的高精地图匹配定位算法。
基于优化的方法包括NDT(Normal Distributions Transform)、ICP(Iterative Closest Point)、基于特征(Feature-based)的 LOAM 系列和 CSM(Correlative Scan Matching)等方法。这些方法利用优化算法对车辆扫描到的传感器数据与地图数据进行匹配,以获得最佳的车辆位置估计。
另一方面,基于滤波的方法采用HF(Histogram Filter,直方图滤波)和PF(Particle Filter,粒子滤波)等方法。这些方法利用滤波算法对车辆姿态和位置进行估计,通过对传感器数据进行实时的滤波和更新,以获得对车辆位置的跟踪和估计。
在目前的开源自动驾驶算法中,Apollo 和 Autoware 都使用了不同的高精地图匹配定位算法。例如,Apollo 使用了NDT匹配定位算法和基于直方图滤波(Histogram Filter)的匹配定位算法,而Autoware则使用了ICP匹配定位算法。
具体来说,NDT算法最早在2003年的文献中提出了2D-NDT算法,随后在2007年的文献中提出了3D-NDT算法。这些算法被广泛运用于开源的PCL(Point Cloud Library)中,为自动驾驶和智能车辆的研究和开发提供了重要的技术支持。
总的来说,高精地图的匹配定位算法是自动驾驶和智能车辆领域的关键技术之一,通过不断的研究和优化,这些算法将为未来智能交通和自动驾驶技术的发展提供更加可靠和精准的定位和导航功能。随着对这些算法的深入研究和应用,相信它们将为人类社会的交通出行带来革命性的变革和提升。
和 2D-NDT 相似,3D-NDT 需要将 3D 点云地图划分为正方体单元块(cells)。
1) 固定分割(Fixed Subdivision)
固定分割方法是以固定尺寸分割点云地图。优点是:初始化单元格的开销非
常小,每个单元格只需要计算一组 PDF 参数,并且定位单元块快。缺点是:固
定分割方法用同样的单元块尺寸描述不同的点云表面,不能充分描述表面的分布。
2) 八叉树分割(Octree Subdivision)
创建八叉树时,根节点包含整个点云地图。然后递归地构建树,若节点中点
云数量超过某个阈值,继续分割该节点。最后得到八叉树的叶节点即单元块。这
种方法的优点是:定位单元块快,单元块中点云数量相近,能更好的描述点云表
面。缺点是:构建八叉树需要较长时间;尺寸小的单元块的影响区域小,可能出
现当前帧和地图对应点不在同一个单元内,影响定位精度。
3) 叠加分割(Additive Subdivision)
针对八叉树分割方法第 2 个缺点,叠加分割方法将叶节点对应节点下的八个
叶节点得分相加,作为落在该叶节点中点的得分。
4) 迭代分割(Iterative Subdivision)
迭代分割方法是在迭代优化的过程中不断改变单元块尺寸的大小。构建不同
尺寸的单元块地图时,由小尺寸单元块地图往大尺寸单元块地图,则大尺寸单元
格地图不需要重头计算,可节省计算时间。
5) 链接细胞和无限外边界(Linked Cells and Infinite Outer Bounds)
在之前的方法中,对于落入没有计算 PDF 的单元块和地图之外区域的点,
是不计算它的得分的。那么当有较多点落入这些区域时,算法比较难收敛。为了
解决这种问题,链接细胞和无限外边界方法使用离该点最近的单元格的 PDF 计
算它的得分。
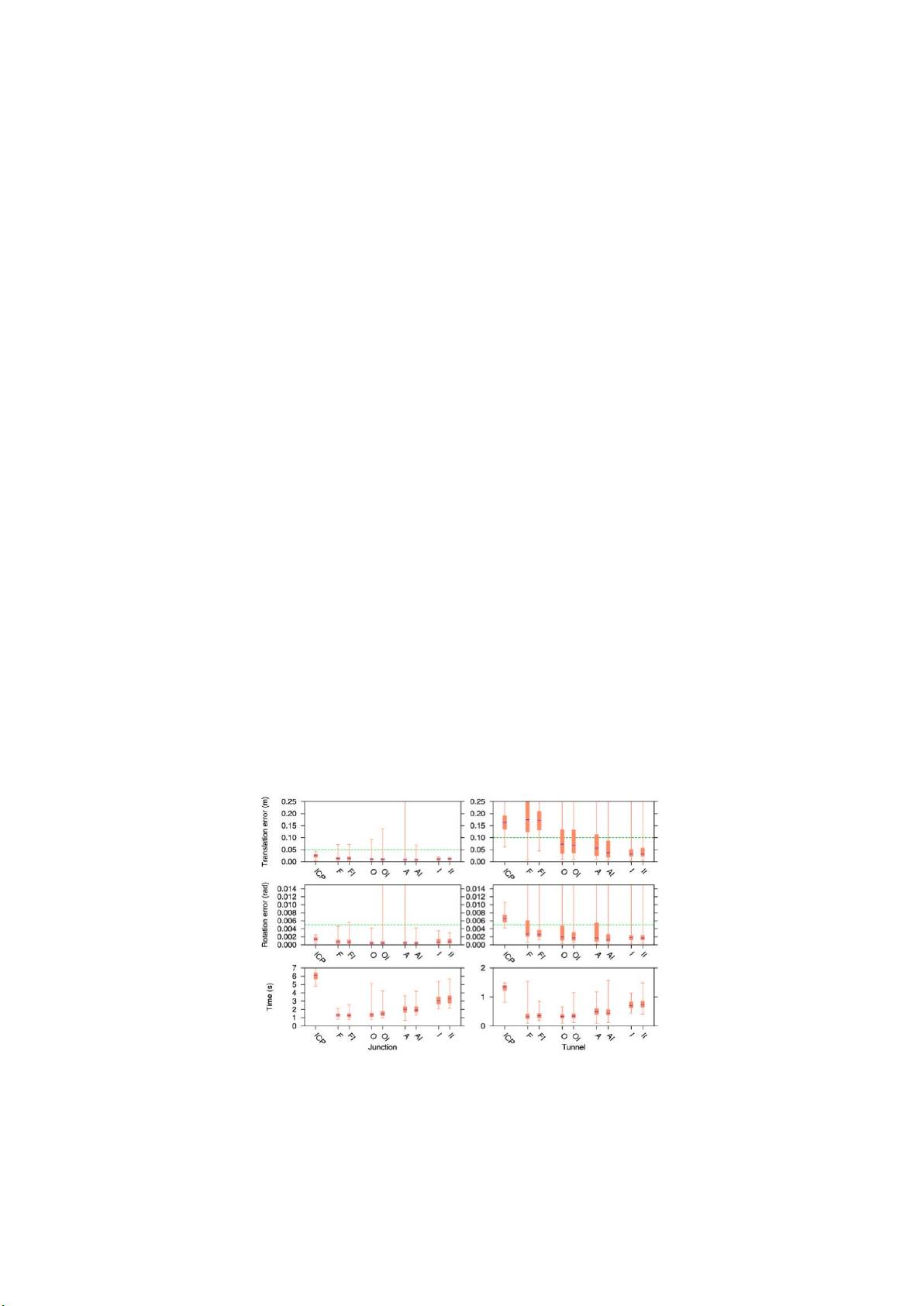
文中通过实验对比了这几种方法,结果如下图所示,F(Fixed)、O(Octree)、
A(Additive)、I(Iterative)分别表示前 4 种分割方法,FI、OI、AI、II 分别表示将将
前 4 种方法与第 5 种方法结合。结果表明,在特征比较显著的 Junction 数据集,
各种方法结果相近,但在特征不显著的 Tunnel 数据集,前 4 种方法的误差依次
减小,与第 5 种方法结合可以有效减小误差。
二、 ICP
1. 算法原理
1992 年,文献[8]提出基于 ICP(Iterative Closest Point)点云匹配定位算法。之
后出现了很多改进得 ICP 算法,如基于点-线的 PLICP、基于点-面的 ICP 等。基
剩余14页未读,继续阅读
2023-09-01 上传
2021-09-20 上传
2021-09-20 上传
2022-04-17 上传
2021-10-02 上传
点击了解资源详情

louirobot
- 粉丝: 188
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
