ROS IMU数据模拟与标定:vio第八期作业解析
需积分: 0 18 浏览量
更新于2024-06-30
收藏 1.5MB PDF 举报
"vio第八期的第二章作业指导,由梁章科主讲,主要涉及使用imu_utils或kalibr_allan进行Allen方差标定,以确定IMU(惯性测量单元)的Bias。作业包括生成静止状态的IMU数据,并通过ROS工具处理和分析。"
在这一章节中,我们关注的是IMU数据的处理和校准,特别是针对vio(视觉惯性 odometry)应用。首先,作业要求生成静止状态的IMU数据,这是为了在无运动干扰的情况下,更好地研究和分析传感器的内在噪声特性。imu_utils和kalibr_allan是两个用于处理这些数据的工具。
imu_utils是一个 ROS 包,它提供了处理IMU数据的各种功能,包括数据记录、预处理、滤波等。在本作业中,我们可以使用imu_utils来计算并分析IMU数据的Allen方差,这是一种评估传感器 Bias 和随机游走噪声的方法。Bias是指传感器在理想无偏状态下的恒定误差,而随机游走则描述了误差随时间变化的特性。通过Allen方差分析,可以量化这些噪声特性。
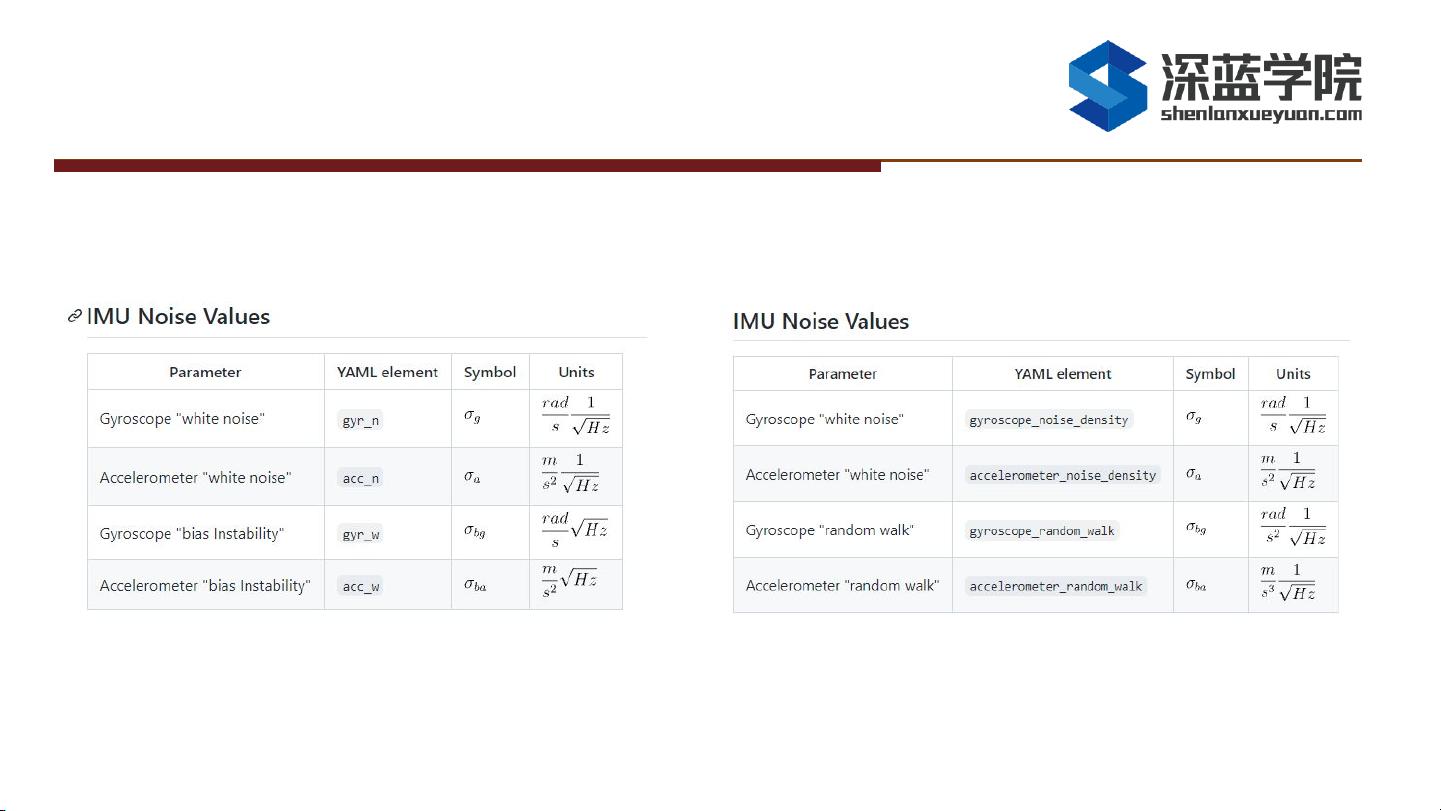
kalibr_allan是kalibr库的一部分,专门用于IMU和相机的标定。除了imu_utils的功能外,kalibr_allan还能够估计 Bias 的随机游走,从而提供更全面的传感器性能评估。在标定过程中,会生成imuData_imu_param.yaml这样的配置文件,其中包含了标定结果,如高斯白噪声和Bias随机游走的参数。
作业的第一部分是下载并编译code_utils和imu_utils。code_utils是一个辅助工具集合,可能包含一些用于数据处理和分析的通用函数。编译这两个包需要先安装Ceres Solver,这是一个强大的非线性优化库,常用于标定和估计问题。
在进行标定时,需要对比标定得到的高斯白噪声和Bias随机游走参数与设定值,以检验IMU的性能是否满足预期。如果使用imu_utils,仅需对比高斯白噪声;而如果使用kalibr_allan,两者都需要比较。这一步骤对于理解和优化vio系统至关重要,因为IMU的噪声特性直接影响到vio的定位精度。
这个作业旨在让学生熟悉IMU数据处理的流程,掌握如何利用imu_utils和kalibr_allan工具进行数据分析,并理解如何通过Allen方差来评估和校准IMU的噪声特性。这对于理解和提高vio系统的整体性能具有重要意义。
基础作业1
imu_utils
Kalibr_allan
IMU仿真代码设定了陀螺仪和加速度计的高斯白噪声和bias随机游走,imu_utils标定得到陀螺仪和加速
度计的高斯白噪声和bias,kalibr_allan标定得到陀螺仪和加速度计的高斯白噪声和bias随机游走,因此
如果选用imu_utils标定,只需对比其高斯白噪声与设定值;如果选用kalibr_allan标定,则需要对比高斯
白噪声和bias随机游走。
剩余19页未读,继续阅读
点击了解资源详情
112 浏览量
点击了解资源详情
2022-08-03 上传
2014-02-27 上传
2022-08-08 上传
2021-04-20 上传
2021-09-01 上传

彥爷
- 粉丝: 24
- 资源: 311
 我的内容管理
展开
我的内容管理
展开







最新资源
- ADA-Framework:ADA框架是第一个旨在简化本机Android应用程序源代码的库。 你准备好了吗?-Android application source code
- 基于matlab的彩色图片去噪
- PHP实例开发源码—PHP飞天下载系统FTDMS.zip
- Creature-Creator:在Unity中按程序生成生物-受孢子启发
- 待办事项
- MATLAB工具箱大全-Matlab数学建模工具箱
- CodeFind:这是一个Android源代码参考应用程序-Android application source code
- leetcode答案-leetcode:学习用基础数据结构与常见算法二刷leetcode相关题目
- 2001年3月主要宏观经济统计指标
- ReactPhotosub:带React的WebSite Photosub
- kaniko-build-private-repo
- leetcode答案-leetcode1701:平均等待时间有一家只有一名厨师的餐厅。给定一个数组customers,其中customers[
- 生成艺术:围棋中的生成艺术
- 2021.1.23
- 金哥哥的秘密小屋.zip
- 金雅拓-Gemalto 智能汽车技术 M2M Automotive-综合文档
