CMSIS-RTOS入门教程:Cortex-M微控制器的实时操作系统
需积分: 49 40 浏览量
更新于2024-07-20
1
收藏 1.82MB PDF 举报
"CMSIS_RTOS_Tutorial.pdf"
这篇教程主要介绍了如何在基于Cortex-M的微控制器上使用轻量级实时操作系统(RTOS),并专注于CMSIS-RTOS标准。CMSIS(Cortex Microcontroller Software Interface Standard)RTOS规范定义了一个用于Cortex-M微控制器的标准RTOS应用程序接口。这个接口旨在为开发者提供一套通用的功能,只需学习一次,就可以在广泛的设备上应用。
CMSIS-RTOS API包括了开发RTOS应用所需的所有功能,如任务管理、信号量、互斥锁、消息队列、定时器和服务调用等。这些功能使得多任务的协调和同步变得更加简单,有助于提高系统的效率和可靠性。通过使用统一的API,开发者可以轻松地将软件组件从一个平台移植到另一个平台,降低了跨平台开发的复杂性。
对于初次接触RTOS的开发者来说,可能需要一段时间来适应这种工作模式,但一旦熟悉了RTOS的机制,如任务创建、任务间的通信和同步,就能体会到它带来的诸多好处。相比于编写裸机程序,RTOS能更好地管理硬件资源,实现更高级别的并发性和实时性,使得复杂的系统设计变得更为可控。
RTOS的核心概念包括:
1. **任务(Tasks)**:RTOS中的基本执行单元,每个任务都有自己的堆栈和执行上下文。通过任务调度器,RTOS可以在多个任务间切换,实现并发执行。
2. **信号量(Semaphores)**:用于同步任务或保护共享资源,当资源被占用时,其他任务会等待信号量释放。
3. **互斥锁(Mutexes)**:类似于信号量,专用于保护临界区,确保同一时间只有一个任务可以访问特定资源。
4. **消息队列(Message Queues)**:允许任务间安全地交换数据,提供了一种异步通信方式。
5. **定时器(Timers)**:可周期性触发事件或一次性执行某操作,增加了系统的实时响应能力。
6. **服务调用(Service Calls)**:RTOS提供的系统服务接口,如任务管理、内存管理等。
通过CMSIS-RTOS,开发者可以利用这些工具构建出高效、可靠且可扩展的嵌入式系统。同时,CMSIS-RTOS还为更复杂的框架(如Java Virtual Machine或UML)提供了标准化的接口,促进了高级软件框架在Cortex-M处理器上的应用。
此外,CMSIS-RTOS还鼓励软件重用,因为它定义了一个通用接口,第三方库和组件开发者可以遵循此接口,确保其产品能在多种Cortex-M设备上无缝运行。这不仅降低了开发者的工作负担,也促进了整个嵌入式社区的协作与创新。
CMSIS-RTOS是Cortex-M微控制器开发的重要工具,它简化了RTOS的使用和移植,提高了开发效率,并为构建复杂的实时系统提供了坚实的基础。通过深入理解和熟练运用CMSIS-RTOS,开发者能够充分利用Cortex-M处理器的潜力,实现高性能、低功耗的嵌入式解决方案。
CMSIS-RTOS Tutorial
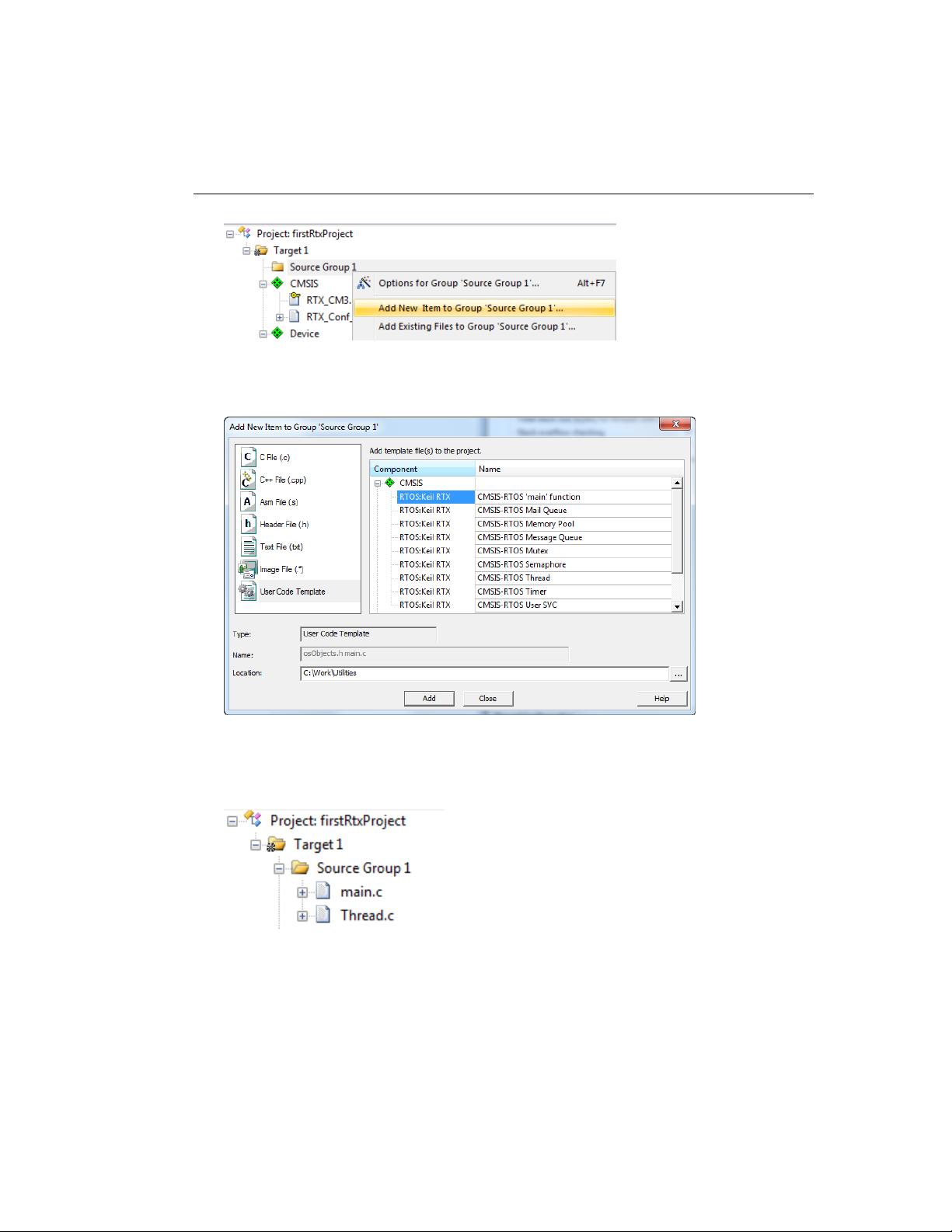
In the Add new Item dialog select the ’User code template’ Icon and in the
CMSIS section select the ‘CMSIS-RTOS ‘main’ function’ and click Add
Repeat this but this time select ‘CMSIS-RTOS Thread’.
This will now add two source files to our project main.c and thread.c
Open thread.c in the editor
We will look at the RTOS definitions in this project in the next section. For now
this file contains two functions Init_Thread() which is used to start the thread
running and the actual thread function.

剩余74页未读,继续阅读
2018-01-27 上传
2021-03-16 上传
2018-09-11 上传
2024-07-03 上传
2017-04-18 上传
2022-04-09 上传

policeman0077
- 粉丝: 0
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- Names:命名事物是困难的
- 课程笔记-机器学习
- jQuery点击锚点链接屏幕滚动特效代码
- Remote Disk Control-开源
- winhlp32 for win10.zip
- jQuery带下划线滑动二级菜单特效代码
- 一款支持横向纵向的日历控件
- RSA在C#和java中的应用
- hl7-standard:简单,轻巧的HL7模块,用于转换,处理或创建HL7消息
- 行业文档-设计装置-移动平台与蓝牙设备的连接方法和连接装置.zip
- flow-db-admin:与流路由器一起使用的Meteor数据库管理软件包
- opttspart:opttspart 将时间序列数据最佳地划分为连续的块,以最大化适应度函数-matlab开发
- Android_Workflow_Test
- 洗衣店
- jQuery百度百科页面滚动导航特效代码
- MyOwnSearchBox-crx插件
