深度学习驱动的夜间无人车红外目标检测与跟踪算法
版权申诉
153 浏览量
更新于2024-07-02
收藏 3.51MB PDF 举报
本文主要探讨了人工智能在夜间无人车环境感知中的关键应用——目标检测与跟踪。随着无人驾驶技术的发展,环境感知能力成为实现自动驾驶的重要组成部分。白天,可见光相机在视觉感知方面表现优异,然而在夜晚或光线不足的情况下,其效能大打折扣。红外热像仪在这些非典型环境中表现出色,但其图像特性如纹理度低、噪声多、缺乏色彩信息等问题限制了其在目标检测上的应用。
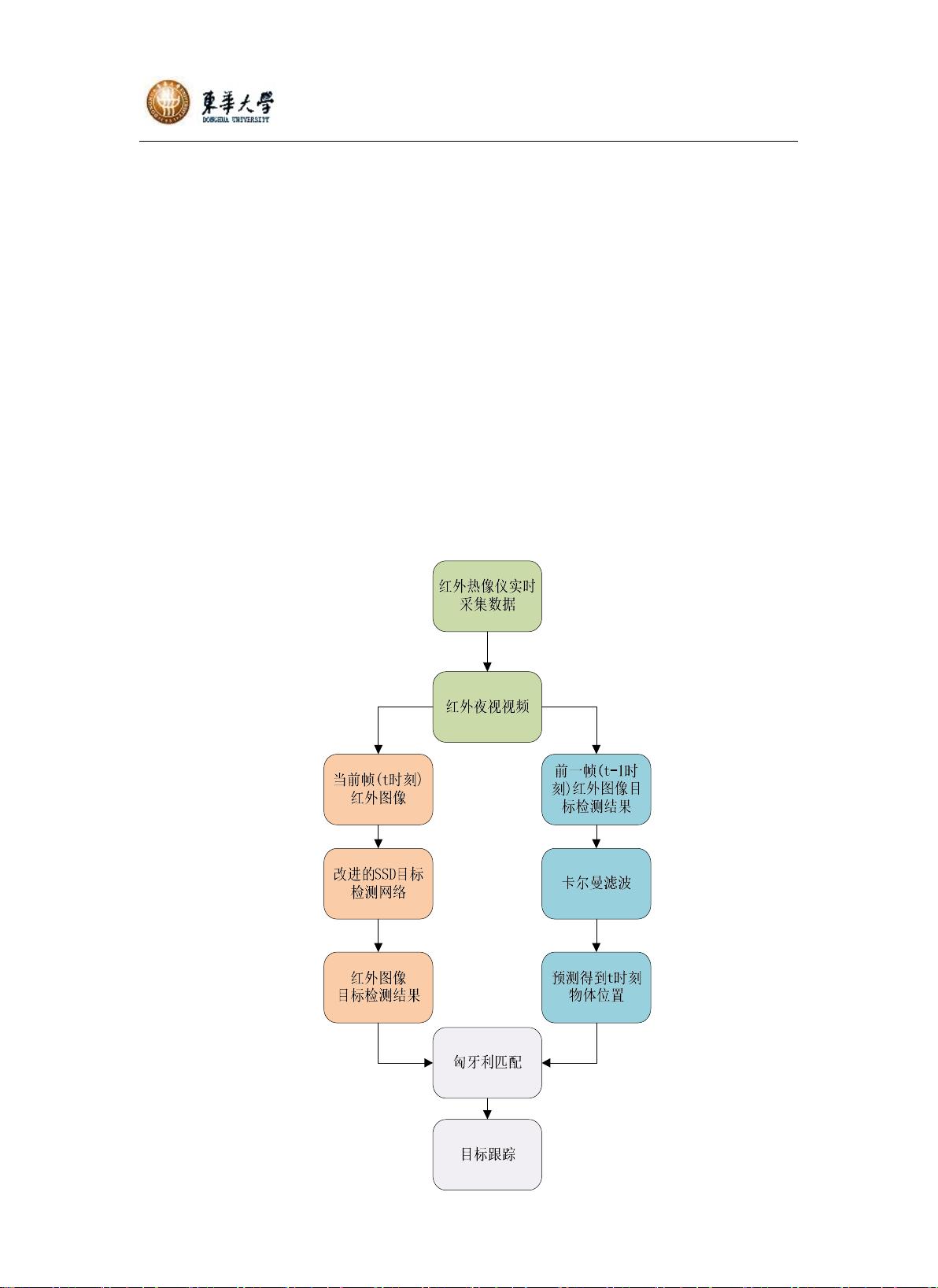
首先,文章深入研究了一种基于深度学习的红外图像目标检测算法,特别是一种改进的SSD(Single Shot MultiBox Detector)算法。作者针对无人驾驶的实时性需求,对原始SSD进行了优化,包括使用DenseNet网络增强特征提取,融合不同层次的特征图以增加信息传递,引入反卷积网络提升语义信息,并采用无锚点机制来更有效地分配目标特征图。此外,作者提出了一种新颖的训练策略,即不依赖预训练模型,以更好地适应红外数据集的特点。
其次,文章将目标检测算法与卡尔曼滤波和匈牙利匹配算法结合,形成了一种红外图像多目标跟踪方案。这个跟踪系统利用卷积神经网络对视频帧中的行人和车辆进行检测,同时运用卡尔曼滤波对前一帧的状态进行预测,再通过匈牙利匹配算法对检测结果和预测结果进行匹配,从而实现了行人和车辆的精确跟踪。这种结合展示了深度学习在复杂环境下的动态目标跟踪能力。
本文的贡献在于提出了一种高效且准确的基于深度学习的红外图像目标检测算法,以及一个结合了先进跟踪算法的解决方案,这对于提升无人车在夜间环境下的自主导航能力具有重要意义。通过实验验证,改进后的算法在实时性和准确性上均优于主流算法,对于推动自动驾驶技术在夜间环境中的实际应用具有重大价值。

1 绪论
5
阶目标检测算法 Faster R-CNN 对红外图像进行行人检测,得到了较好的检测结
果。本文将 SSD 网络应用在红外图像上,对红外图像上的行人与车辆同时进行
检测,在保证实时性的前提下对该网络做了改进和优化,加强了对中小尺寸目标
和遮挡情况的检测,检测准确率有了明显的提升。
1.2.3 红外图像目标跟踪算法研究现状
目标跟踪同样是计算机视觉领域中的一个重要研究方向。基于视觉的目标跟
踪任务应用于多个领域,安防监控中的动作及行为分析、医疗图像的细胞跟踪、
智能交通
[22]
、自动驾驶领域中的行人或者车辆跟踪
[23]
等等。按照图像中目标的数
量可分为单目标跟踪、多目标跟踪,如果跟踪的场景从始至终只有一个目标则是
单目标跟踪,多于一个目标则是多目标跟踪。单目标跟踪只需要在视频的第一帧
检测到单个目标,然后预测后续帧中该目标的位置和大小即可。多目标跟踪任务
则不像单目标跟踪那么简单,在给定视频中目标的个数和位置均不确定,需要同
时定位场景中出现的多个目标,并维持目标的编号不变、记录其运行轨迹。这就
涉及到新目标的出现和消失目标的删除、多个目标之间的遮挡和重叠、跟踪目标
的相似度判断等一系列问题。本文所研究的夜间红外图像中的行人与车辆跟踪就
是多目标跟踪问题。
相对比于多目标跟踪任务,关于单目标跟踪任务的研究更加广泛,解决方案
也相对成熟。一些主流算法,如 Mean shift 算法、KCF(Kernel Correlation Filter)
相关性滤波算法等等。KCF 相关滤波来自于信号处理的研究,即衡量两个信号的
相似度响应值的大小,应用在目标跟踪任务时则是依据响应值的大小判定目标的
位置,响应最大的位置就是目标的实际位置。实现过程如下:跟踪过程中利用训
练好的目标检测器进行下一帧的目标检测,然后使用相关滤波算法对下一帧中的
目标进行相关滤波,实现目标的跟踪。单目标跟踪方法
[24][25]
通过学习判别模型进
行目标跟踪,并将目标与背景分离开。Valmadre 等人
[26]
首次提出基于相关滤波
器的孪生跟踪器,这个跟踪器能够提取相关滤波器的深层特征。国内的商汤科技
团队提出的 SiamRPN
[27]
以及后续改进的 SiamRPN++
[28]
保持着世界领先水平,
SiamRPN 将跟踪问题转化为单目标检测问题,通过对给定视频的初始帧信息来
初始化目标检测器。通过利用孪生网络实现目标的跟踪,利用跟踪目标的信息对
万方数据

剩余60页未读,继续阅读
2021-08-19 上传
2023-07-17 上传
2021-09-01 上传
2021-08-11 上传
2021-08-12 上传
2021-08-14 上传
2021-08-23 上传
2021-08-14 上传
2022-05-25 上传

programhh
- 粉丝: 8
- 资源: 3741
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
