RSLogix5000中的PIDE指令详解:增强型PID控制与自整定应用
需积分: 13 69 浏览量
更新于2024-08-05
收藏 416KB DOC 举报
在RSLogix5000 V13.0及以上版本的编程软件中,PIDE指令是一种增强型PID控制指令,用于FBD(功能块图)设计中,特别适用于采用速度增量算法的控制系统。PIDE指令的引入旨在简化PID参数调整过程,并提供了自整定功能,可根据系统的实际需求自动优化P(比例)、I(积分)和D(微分)控制器参数,节省了调试时间。
在使用PIDE指令时,首先需要创建一个工程,包括选择合适的CPU型号、设定程序版本、命名工程并描述其用途。接下来,创建周期性任务,定义任务的名称、描述、周期、优先级和看门狗时间,确保任务的稳定运行。接着,创建程序组,将它们组织到特定的任务中,便于管理和维护。
进入程序段设计阶段,用户需创建一个新的程序段,指定名称、描述以及所属的程序组和图例类型。在该程序段内,通过FBD或相应模块插入PIDE指令,如图5所示,其默认名称可通过编辑修改。PIDE指令中的关键参数包括:
1. **EnableIn**:指令启用开关,用于控制PIDE功能是否生效。
2. **PV**:过程反馈变量,表示系统实际测量值,需要经过标度变换以便与控制器正确交互。
3. **PVEUMax** 和 **PVEUMin**:PV的上、下限,确保控制过程在安全范围内。
4. **SPCascade**:远程设定点(SP),即目标值,可以远距离设定。
5. **SPHLimit** 和 **SPLLimit**:SP的上限和下限,防止超出控制范围。
6. **CVInitReq**:CVEU(控制误差绝对值)的初始设定请求,当为1时,表示在启动时需要一个初始设定。
PIDE参数的设置应根据实际工艺过程和设备特性进行,以达到最佳控制效果。自整定功能可在手动模式下启用,通过调整参数以达到PID控制器的最佳性能。PIDE指令的使用极大地方便了AB PLC控制系统的设计和调试,提高了自动化控制的效率和精度。
RSLogix5000编程软件中 PIDE 指令的使用
在 RSLogix5000 V13.0 以上编程软件版本中在 FBD 块中提供一指令 PIDE,
中文名称为增强型 PID 控制指令,采用速度增量算法,区别于传统梯形图指令
PID(位置增量算法)。PIDE 指令自带自整定功能,在 PIDE 指令手动模式下,
可以通过自整定来确定 P、I、D、参数,减少 PID 参数调节的时间,另外在自
整定前,其 PV 类型可选(流量、压力、温度、位置等)。现将指令用法作一
简要说明,以下所有图片均来源于测试工程截图。
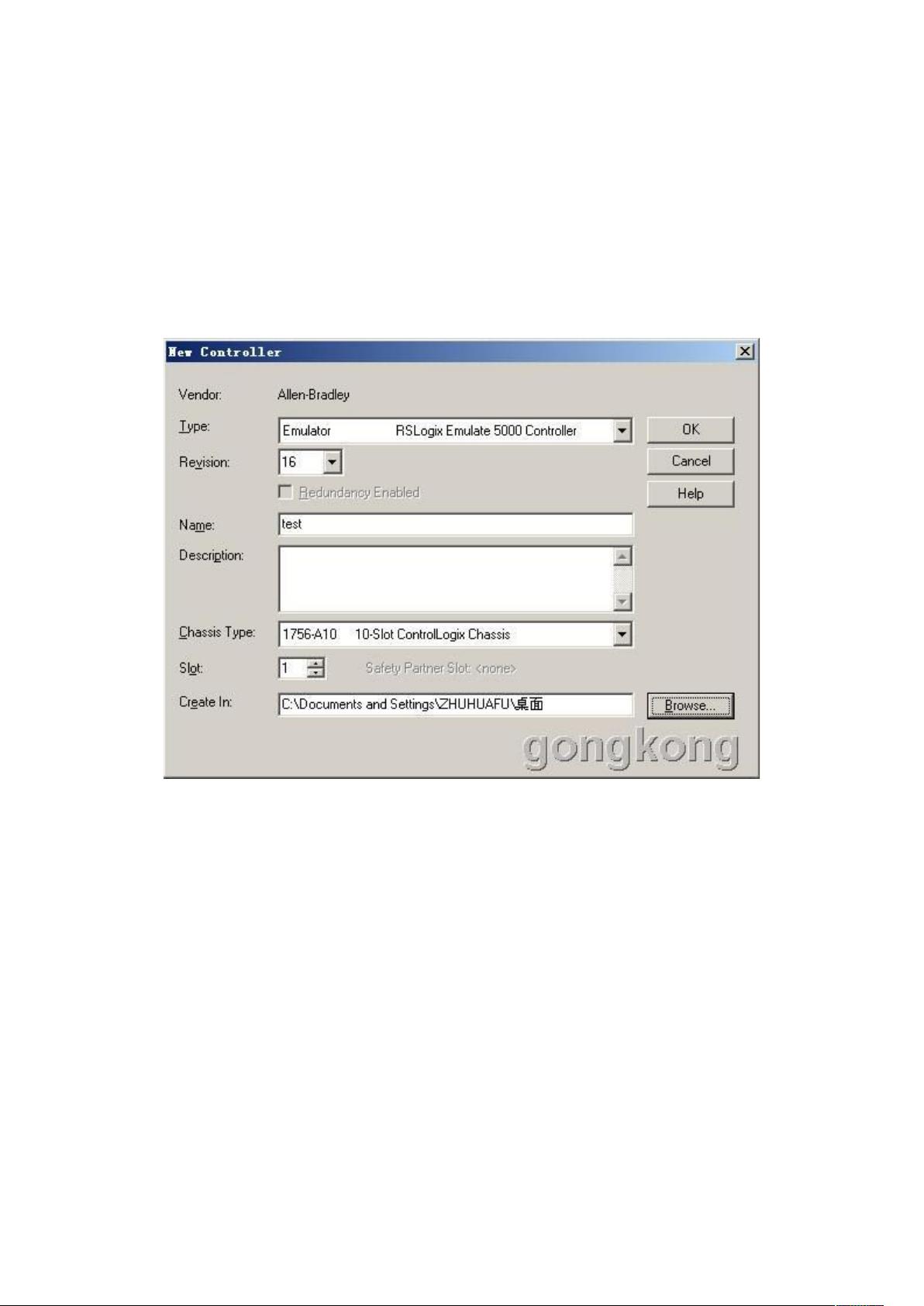
创建一个工程,
图 1:创建工程
Type:CPU 型号
Revision:程序版本号
Name:工程名字
Description:工程描述
Chassis Type:机架类型
Slot:CPU 所在机架槽号(机架槽号编号从 0 开始)
Create In:工程保存位置
1、vv创建一周期性任务,如图 2 所示:
下载后可阅读完整内容,剩余8页未读,立即下载
220 浏览量
2024-11-06 上传
2024-11-06 上传
2022-09-21 上传
178 浏览量
2021-09-22 上传
336 浏览量
点击了解资源详情

zhipeng6927
- 粉丝: 1
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- joglohub:博客平台
- AndroidApp:尝试 Android 开发
- 行业分类-设备装置-一种接口扩充装置及其控制方法.zip
- YUV转H264代码 运行于ubuntu系统
- metadata-automation:CLOSER启动的元数据和机器学习工作的网站
- arm.rar android平台可运行的ffmpeg库
- rollup-federation:汇总捆绑器中的模块联合
- 百度向安卓推送消息SDK
- 预测房屋价格
- zset:golang中的排序集
- nginx-1.6.3.zip
- springboot的java
- News-Aggregator-Site:一个可以在一个地方访问所有喜爱的新闻媒体的站点
- date-fns-jalali:贾拉利日历的现代JavaScript日期实用程序库
- 行业分类-设备装置-一种接口调用方法、装置及终端.zip
- tasks
