基于视觉导航的轮式移动机器人底层控制系统设计
版权申诉
175 浏览量
更新于2024-06-11
1
收藏 843KB DOC 举报
基于视觉导航的轮式移动机器人
本设计的研究内容是视觉导航轮式移动机器人的底层控制,其核心内容是应用单片机控制步进电机实现机器人的左转弯、右转弯、前进和停止等动作。
Knowledge Point 1:移动机器人研究现状
移动机器人研究的主要目标是实现机器人的自主性和智能化,提高机器人的适应性和可靠性。当前移动机器人的研究主要集中在机器人的感知、导航、控制和人机交互等方面。
Knowledge Point 2:视觉导航轮式移动机器人系统设计
视觉导航轮式移动机器人系统由机器人本体、感知系统、控制系统和执行系统四部分组成。其中,感知系统负责机器人的感知和环境探测,控制系统负责机器人的控制和决策,执行系统负责机器人的执行和动作。
Knowledge Point 3:PIC16F877单片机在机器人中的应用
PIC16F877单片机是一种常用的微控制器,广泛应用于机器人、自动控制、智能家居等领域。其优点是小巧、低功耗、易于编程和高可靠性。在机器人中,PIC16F877单片机可以作为下位机,接收上位机传来的命令和产生驱动信号。
Knowledge Point 4:步进电机驱动电路设计
步进电机驱动电路是机器人中的关键组件,负责机器人的运动控制。步进电机驱动电路的设计需要考虑电机的参数、驱动方式和控制算法等因素。在本设计中,我们采用L298步进电机驱动器,驱动程序写入PIC16F877单片机,通过程序控制步进电机的转速和转向。
Knowledge Point 5: Proteus仿真设计
Proteus是一种常用的电子设计自动化(EDA)工具,能够对电子电路进行仿真和设计。在本设计中,我们使用Proteus对机器人的电子电路进行仿真和设计,模拟机器人的运动控制和步进电机的驱动。
Knowledge Point 6:机器人底层控制系统设计
机器人底层控制系统是机器人中的关键组件,负责机器人的运动控制和执行。机器人底层控制系统的设计需要考虑机器人的运动学、动力学和控制算法等因素。在本设计中,我们设计了一种基于视觉导航的机器人底层控制系统,能够实现机器人的左转弯、右转弯、前进和停止等动作。
Knowledge Point 7:机器人运动控制算法
机器人运动控制算法是机器人运动控制的核心,负责机器人的运动控制和执行。在本设计中,我们设计了一种基于PID控制算法的机器人运动控制算法,能够实现机器人的稳定运行和高可靠性。
Knowledge Point 8:机器人视觉导航系统设计
机器人视觉导航系统是机器人中的关键组件,负责机器人的环境探测和运动控制。在本设计中,我们设计了一种基于视觉导航的机器人视觉导航系统,能够实现机器人的自主性和智能化。
知识点9:机器人硬件系统设计
机器人硬件系统是机器人中的关键组件,负责机器人的执行和运动控制。在本设计中,我们设计了一种基于PIC16F877单片机的机器人硬件系统,能够实现机器人的左转弯、右转弯、前进和停止等动作。
知识点10:机器人软件系统设计
机器人软件系统是机器人中的关键组件,负责机器人的控制和执行。在本设计中,我们设计了一种基于C语言的机器人软件系统,能够实现机器人的运动控制和执行。

第2章 视觉导航的轮式移动机器人综述
§2.1 视觉导航的轮式移动机器人
现代机器人技术在人工智能、计算机技术和传感器技术的推动下获得了
飞速发展,其中移动机器人因具有可移动性和自治能力,能适应环境变化被
广泛用于物流、探测、服务等领域。移动机器人的核心技术之一是导航技术,
特别是自主导航技术。由于环境的动态变化和不可预测性、机器人感知手段
的不完备等原因,使得移动机器人的导航难度较大,一直是人们研究的重点。
目前常用的一种导航方式是“跟随路径导引”,即机器人通过对能感知到某
些外部的连续路径参考信息做出相应的反应来导航。如在机器人运动路径上
敷设金属导线或磁钉,通过检测金属导线或磁钉的特征信息来确定机器人的
位置。从导航的角度看,这种方法的优点是可靠性较高,但功能单一,如不
能在行进的同时对目标进行识别、避障,对环境的适应能力较弱、灵活性较
差、维护成本较高,因此限制了其在移动机器人中的应用。
随着计算机技术、数字图像处理技术及图像处理硬件的发展,基于计算
机视觉的导航方式在机器人导航中得到广泛关注。在实际应用中,只需要在
路面上画出路径引导线,如同在公共交通道路上画的引导线一样,机器人就
可以通过视觉进行自主导航。相对于敷设金属导线、磁钉等方法,这种方法
增强了系统的灵活性,降低了维护成本。视觉信息中包含有大量的数据,要
从中提取有用的信息,需要复杂的算法及耗时的计算。如何保证视觉导航系
统在正确理解路径信息的前提下仍具有较好的实时性和鲁棒性,是该方法要
解决的核心问题。
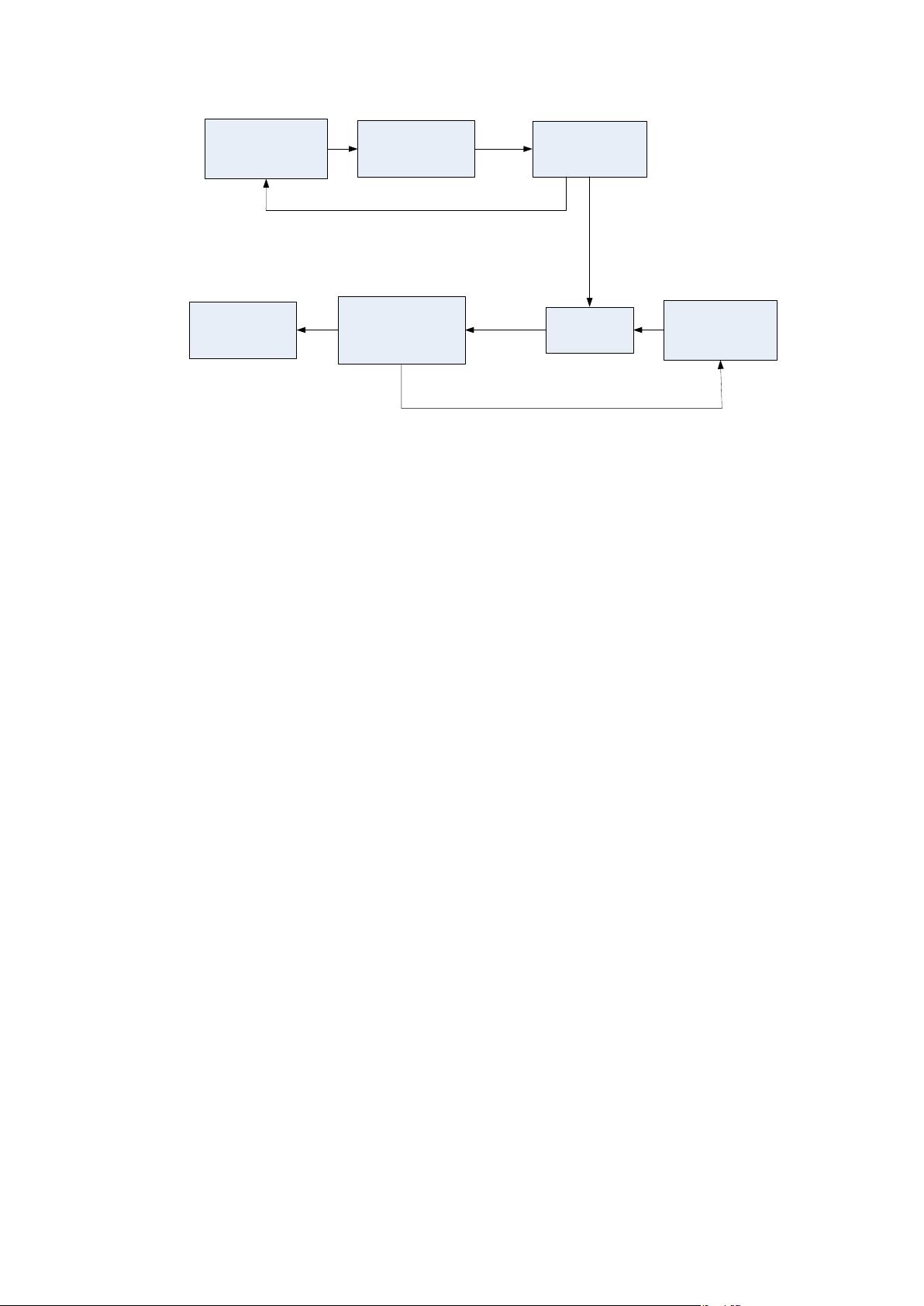
§2.2 视觉导航系统构成及工作过程
基于计算机视觉的移动机器人导航实验系统的硬件部分由计算机、摄像
头、机器人地盘组成。软件分为两部分,即图像处理和机器人运动控制。基
于视觉导航的原始输入图像是连续的数字视频图像。系统工作时,图像预处
理模块首先对原始的输入图像进行缩小、边缘检测、等预处理。其次利用计
算机计算并提取出对机器人有用的路径信息。最后,运动控制模块根据识别
的路径信息,调用直行或转弯功能模块使机器人做相应的移动。
剩余54页未读,继续阅读
2023-07-11 上传
2023-06-24 上传
239 浏览量
182 浏览量
607 浏览量
2024-11-11 上传
186 浏览量
2024-11-11 上传
2024-10-25 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 一本全面的C语言入门教程
- Android模拟器及编译环境安装新手入门.pdf
- XML 实用大全.doc
- 考研英语真题阅读理解精读笔记
- java 高级教程电子版
- C语言的有关技巧编程公式的方法,介绍及窍门---不看后悔100年
- Java路径问题最终解决方案之一.txt
- 手机网站WAP建站基础教程.doc
- C#网络应用基础编程课后习题答案
- 深入浅出ARM7-LPC213x_214x(下)
- 网站大访问量c10k问题 aio方案 搜狗 sogou开发技术文档
- 解密深入浅出ARM7-LPC213x_214x(上)
- sql 命令基础语法
- 基于立宇泰ARMSYS2440—ubuntu下linux嵌入式开发环境配置
- Qt嵌入式图形开发(实战篇).pdf
- IBM+Lotus+Domino+7+邮件服务器配置全程攻略+V0.2
