自动驾驶技术:理论、算法与实现
需积分: 50 128 浏览量
更新于2024-07-19
10
收藏 4.7MB PDF 举报
"《自动驾驶理论 算法实现》由洪成教授编著,深入探讨了自动驾驶技术,包括SLAM(同时定位与建图)、辅助驾驶等关键领域,旨在为学习者提供必要的理论基础和实践指导。"
在当前科技飞速发展的时代,自动驾驶已经成为未来智能交通的重要组成部分。这本书详细阐述了自动驾驶的理论与算法实现,涵盖了多个关键知识点:
1. **自动驾驶基础**:自动驾驶的基础涉及车辆动力学、传感器技术(如雷达、激光雷达、摄像头等)以及高精度地图。书中可能介绍了如何通过这些技术让车辆理解周围环境并做出决策。
2. **SLAM(同时定位与建图)**:SLAM是自动驾驶技术中的核心技术之一,用于构建环境地图的同时确定自身位置。书中会详细讲解SLAM的基本原理,包括滤波方法(如卡尔曼滤波、粒子滤波)和优化方法(如图形SLAM),以及实际应用中的挑战和解决方案。
3. **环境感知与目标检测**:自动驾驶系统需要识别道路上的障碍物,如其他车辆、行人、交通标志等。这部分可能涵盖深度学习模型,如卷积神经网络(CNN)在图像识别和目标检测中的应用。
4. **路径规划与决策制定**:一旦车辆感知到环境,就需要进行路径规划以安全、高效地到达目的地。这部分可能涉及A*算法、Dijkstra算法等经典路径规划方法,以及基于规则和学习的决策制定策略。
5. **控制系统设计**:自动驾驶系统需要能够控制车辆的转向、加减速等,这需要精确的控制理论,如PID控制器、模型预测控制等。
6. **辅助驾驶系统**:虽然完全自主驾驶还在发展中,但辅助驾驶系统(ADAS)已经广泛应用。书中可能会介绍ADAS的功能,如自适应巡航控制、盲点监测、自动紧急刹车等,并分析它们如何逐步迈向全自动驾驶。
7. **安全性和法规问题**:自动驾驶的安全性是公众关注的焦点,书中的内容可能涉及到如何设计安全机制,以及各国对于自动驾驶的法律法规。
8. **实践案例与实验**:为了帮助读者更好地理解和应用理论,书里可能会包含真实世界的数据集和模拟实验,让读者有机会亲自实践自动驾驶算法。
通过学习这本书,读者不仅可以掌握自动驾驶的理论知识,还能了解到最新的研究成果和实践经验,为在自动驾驶领域的发展打下坚实基础。
8 1 Introduction
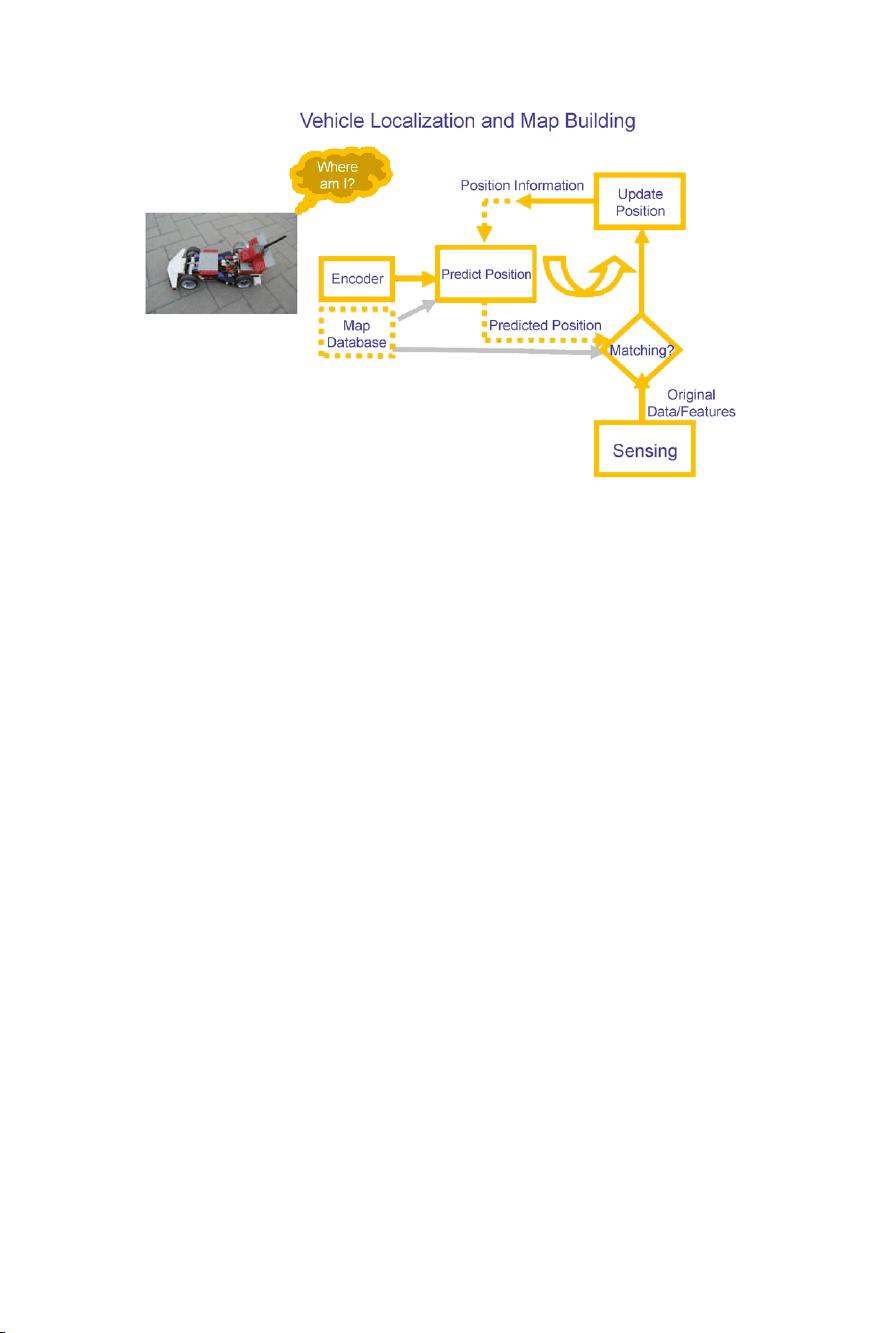
Fig. 1.3 The framework of vehicle localization and navigation
used in vehicle localization, its performance could degrade due to signal blockages
and reflections of buildings and trees. In the worst case, Inertia Navigation Sys-
tem (INS) can maintain a position solution. As for the second issue, local maps
fusing laser, radar, and vision data with vehicle states are used to locate and track
both static/dynamic obstacles and lanes. Furthermore, global maps could contain
lane geometric information, lane makings, step signs, parking lots, check points and
provide global environment information. Referring to the third issue, various noise
modules are considered to reduce localization error [26].
Map building using various sensors has been addressed by many researchers [18,
22], and it needs to yield the interpretation for the sensor information. Intelligent
vehicles could be navigated under the conditions of either known maps or unknown
maps. For example, the DARPA Grand Challenge provided the Route Network Def-
inition File (RNDF), which belongs to the case of known maps. However, in ex-
ploring Mars, intelligent vehicles could not have the maps of Mars beforehand. This
problem is formulated as localizing vehicles traveling in an unknown environment.
In this problem, we will handle the dual task of localizing the vehicle and simul-
taneously modeling the environment, a.k.a., Simultaneous Localization and Map
Building (SLAM) [8]. Figure 1.3 illustrates the framework of vehicle localization in
an iterated way.
1.2.3 Path Planning and Decision-Making
For the purpose of safe and energy saving navigation, vehicles try to find an opti-
mal path in 2D/3D road space from the initial position to the target position avoid-
ing both static and dynamic obstacle collisions. Hence, global path planning is to


剩余149页未读,继续阅读
2021-01-27 上传
2023-09-17 上传
2023-06-10 上传
2024-07-24 上传
2023-06-07 上传
2023-07-17 上传
2023-12-27 上传

gzwhd
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
