Matlab PID控制参数kp, ki, kd详解与根轨迹分析
版权申诉
PDF格式 | 1.16MB |
更新于2024-06-30
| 172 浏览量 | 举报
在"matlabpid(比例微分控制)kp,ki,kd讨论.pdf"这份文件中,主要探讨了MATLAB中的PID(比例-积分-微分)控制器在控制系统设计中的应用,特别是针对比例系数(kp)、积分系数(ki)和微分系数(kd)的调整。该文档是武汉工程大学电气信息学院的一份实验报告,由2015级测控技术与仪器1-2班的余文广同学完成,实验目的是为了让学生理解和掌握基于Matlab的控制系统根轨迹分析方法。
实验的核心内容围绕着如何使用Matlab进行控制系统的设计和分析,例如,对于给定的单位反馈控制系统开环传递函数G0(s) = k*(s(s+1)(s+2) / (s(s+2)(s^2+2s+2)))和被控对象传递函数G(s) = 400/(s^2+30s+200),学生需要设计PID控制器来实现单位阶跃响应,并通过Matlab绘制根轨迹图,以便分析系统的稳定性。
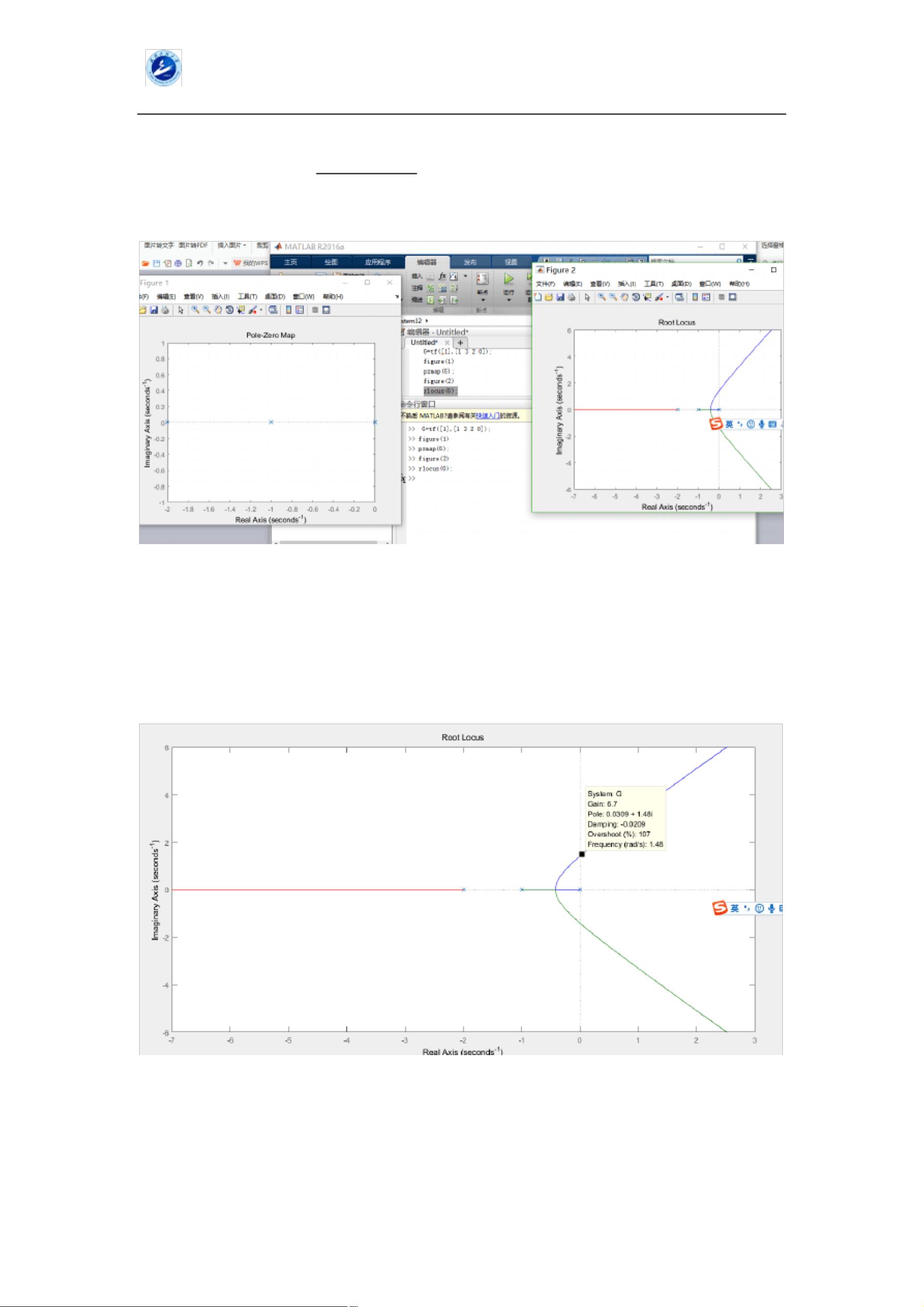
在实验的第一部分,学生回顾了连续环节、非线性环节、离散环节等基本概念,以及数学运算环节、输出方式和输入源等相关知识。这部分内容帮助学生建立起控制系统设计的基础理论框架。随后,重点转向实际操作,即利用Matlab中的函数如`rlocus`或`root locus`绘制根轨迹图。图1-1展示了例题B-3的Matlab根轨迹图,图中展示了零点、极点分布以及根轨迹的分支情况,这些都对设计合适的PID参数至关重要,因为根轨迹的位置和形状会影响系统的动态响应和稳定性。
实验的第二部分深入讨论了如何根据系统特性和性能需求,如快速响应和抑制振荡,合理选择kp、ki和kd的值,以及如何通过调整这些参数来优化根轨迹的位置。学生可能还会涉及到如何找出分离点渐近线的交点和渐近线与实轴的交点,这些都是确定PID参数的依据。
最后,实验报告以总结的形式归纳了所学的理论知识和实践经验,强调了PID控制器在实际控制系统设计中的应用价值,以及如何通过Matlab工具进行有效的模拟和分析。
这份文档不仅提供了MATLAB PID控制的具体实施步骤,还涵盖了控制系统理论的基础知识,有助于读者理解和掌握PID控制器的设计和根轨迹分析在工程实践中的应用。
电气信息学院 武汉工程大学
School of Electrical and Information Engineering Wuhan Institute of Technology
k *
图 1-2 有关
s(s 1)(s 2)
的 Matlab 根轨迹图仿真
2.说明:如上图可见,左图为零极点分布,右图为关于 K 的根轨迹图,中间为程序图。
有 3 个极点,分别是 0、-1、-2 无零点。即可判断根轨迹有三条分支。可以初步判断根轨迹
分离点在-1、-2 之间,如右图所示。同时也可根据计算计算出相应分离点渐进线交点、渐进
线与实轴交点等。程序语句中 pzmap(G)表示绘制零极点分布图指令,而 rlocus 则表示绘
制根轨迹指令。
图 1-3 如图为根轨迹与虚轴交点说明图
3.说明:如上如所示当点击根轨迹与虚轴交点时,出现如图文字框图可以看到相关数据,
比如增益、阻尼等。
Page III
下载后可阅读完整内容,剩余15页未读,立即下载
相关推荐




12 浏览量


a66889999
- 粉丝: 45
 我的内容管理
展开
我的内容管理
展开








最新资源
- Delphi开发的Android数据查询WebService教程
- MATLAB在金融数量分析中的应用与技巧
- 解决非英语系统中FME扩展ArcGIS扩展问题
- 打造个性侧边栏抽屉效果的iOS源代码
- 谷歌翻译API在网站多语言转换中的应用
- 掌握IPOP4.1:网络工程师的十大实用网络管理功能
- Cain4.9汉化版及Winpcap32/64位绿色安装指南
- 提升效率的快捷键小程序使用教程
- Intel HEX与BIN文件互转工具介绍
- 2006年软件设计师历年试题精解与答案解析
- MATLAB系统辨识仿真源码及其可视化教程
- 自定义TBActivityView源代码教程:实现翻转型进度指示器
- 车载导航仪端口检测新软件:简易运行,即时显示波特率与端口
- MPEG-2解析工具及TS流分析教程
- Android ListView下拉刷新功能实现教程
- Android资讯类APP开发:JSON(xml/Webservice/UPnP)交互教程











