




AutoSAR架构下的CAN通讯详解:取消地址编码与PDU在汽车电子中的关键作用
113 浏览量
更新于2024-08-27
收藏 558KB PDF 举报
"基于AutoSAR架构的CAN通讯是一种在汽车电子化与自动驾驶发展中广泛应用的关键技术。AutoSAR(Automotive Open System ARchitecture)是一个为汽车行业设计的开放系统架构,旨在提高系统的可重用性、互操作性和安全性。本文首先概述了AutoSAR的基础框架,特别关注通信子系统,如LIN、CAN和Ethernet(Eth),其中CAN总线因其抗干扰性和高效性被广泛应用。
CAN(Controller Area Network)总线通信采用了非寻址方式,通过消息编码实现节点间的数据交换。每个节点都能接收到总线上的消息,然后根据消息ID决定是否接收。数据传输过程涉及三个主要步骤:物理层通过CAN收发器将高低电平信号转换为逻辑电平的二进制码流;数据链路层的CAN控制器负责生成CAN帧,包括位填充、CRC校验和应答检查;交互层则负责解析、处理CAN帧并将其路由到相应的模块。
PDU(Protocol Data Unit)在AutoSAR架构中起着至关重要的作用,它是数据传输的基本单元,根据层级不同分为I-PDU(交互层)、N-PDU(网络层)和L-PDU(数据链路层)。每个PDU由PCI(包含源和目标地址)和SDU(数据信息)组成。在CAN通讯中,如图3所示,数据流从CAN驱动器开始,经过多个阶段,最终传递给目标模块,形成一个标准化和有序的数据交换过程。
图4展示了详细的CAN通讯数据流示例,通过这个流程,CAN总线能够确保在复杂的汽车系统中高效、可靠地传递信息。理解并掌握这种基于AutoSAR的CAN通讯方式对于汽车电子工程师来说至关重要,因为它直接影响到车辆的性能、安全性和系统集成的复杂性。"
这个综述提供了AutoSAR架构下的CAN通讯的核心原理和技术细节,对于理解和设计现代汽车电子系统具有很高的参考价值。通过学习这些知识,工程师们可以更好地构建和优化汽车通信网络,适应不断发展的自动驾驶技术挑战。
基于基于AutoSAR架构的架构的CAN通讯简介通讯简介
01基于AutoSAR CAN通讯过程简介
随着汽车电子化与自动驾驶的发展,AutoSAR汽车开放式系统架构得到越来越多的重视与应用。继之前对AutoSAR进行简介
之后,本文进一步深入对基于AutoSAR的CAN通讯进行介绍。
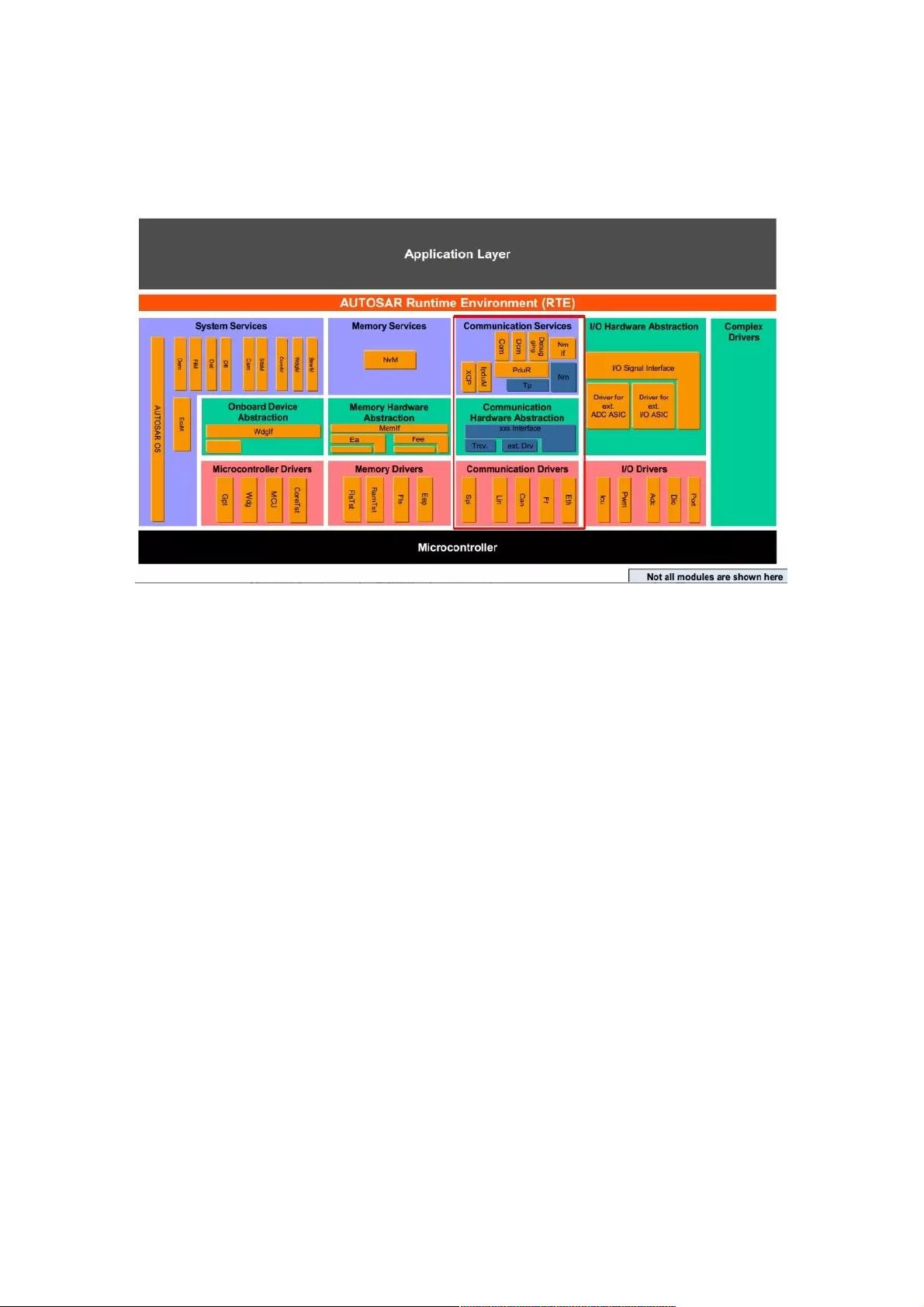
如下图1所示为常见AutoSAR基础框架,其中红框部分为与通讯相关的部分,包括LIN、CAN、Eth等。
图1 AutoSAR基础框架
CAN总线通讯取消地址编码的方式,采用消息编码的方式,总线上各个节点都能收到总线发出的消息。各个节点根据ID判断
是否为自身所需要的消息进行接收。总线到应用层之间的消息传递以及数据转换过程如下:
1、总线上只能传递高低电平的物理信号,CAN收发器(软件上包含CAN Driver,CAN transceiver,Driver for CAN ASIC)
将总线传递过来的差分电平转换为逻辑电平(TTL电平)(发送时相反)生成二进制码流;CAN收发器将二进制码流发送给
CAN控制器(软件上包含CAN Interface)。(数据链路层)
2、CAN控制器将在二进制码流的基础上生成CAN帧(CAN帧最大传输数据为8byte,此处不详细介绍CAN帧结构以及种
类),同时进行位填充、添加CRC校验、应答检查等操作(发送时类似)。(网络层)
3、通讯服务在收到下层传递过来的CAN帧消息之后进行解析提取、处理CAN帧中包含的信号,通过路由转发给需要的模块。
(交互层)
02 PDU简介
在介绍完基本数据流向之后,介绍一个重要概念:PDU。PDU是AutoSAR通讯过程中一个重要的概念,全称:协议数据单元
(protocol data unit),是数据传输的基本单位。在不同的架构层有不同的PDU分为以下几种:
I-PDU(交互层)
N-PDU(网络层)
L-PDU(数据链路层)
PDU包含PCI和SDU两部分,PCI包含源地址和目标地址信息,SDU是数据信息。如下图2所示为PDU基本组成。
下载后可阅读完整内容,剩余4页未读,立即下载
1412 浏览量
3070 浏览量
413 浏览量
基于CAN通讯的rh850u2a16芯片Bootloader与OTA固件刷写系统,基于CAN通讯的rh850u2a16芯片Bootloader及OTA固件刷写系统,rh850 can uds刷写 bo
2025-02-16 上传
基于CAN通讯的rh850u2a16芯片BootLoader刷写与OTA更新技术详解:实现single map与double map下的安全固件扩展及ICUM互通数据交互方案,rh850 can ud
2025-01-30 上传
点击了解资源详情
824 浏览量
点击了解资源详情

weixin_38523728
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Mashygos 字体:独特设计与创意应用
- Retrospection.CommandLine包优化:添加注释与示例项目
- 徐科军深入讲解信号处理技术的全貌
- Postman: 强大的HTTP接口测试实用工具
- USB鼠标数据包工具V1.0使用教程
- Hi-Converter V1.4.0:高效数据格式转换解决方案
- Mashydsh字体压缩与管理指南
- 2012-2017年软件设计师真题解析全集
- React App入门教程:从创建到部署
- XS128单片机程序教程全面解析
- Mashybng字体设计与应用解析
- C语言入门:实现图像处理中的高斯滤波技术
- Eclipse 3.6.2汉化教程:简易操作指南
- Android端综合定位技术分享:Wi-Fi基站与GPS
- 探索Swift语言在移动应用开发中的统一之道
- Android开发必备工具类合集:文件、图片与权限处理






















