自由落体运动的卡尔曼滤波高度速度估计
版权申诉
88 浏览量
更新于2024-06-27
收藏 646KB DOCX 举报
"这篇文档是关于使用卡尔曼滤波算法对自由落体物体高度和速度进行最优估计的案例分析。给定20次物体高度的测量数据,假设测量误差服从高斯分布,初始高度和速度也具有高斯分布特性。通过牛顿第二定律构建状态方程,再利用离散化方法得到离散状态方程。然后,设定测量方程,最后应用卡尔曼滤波算法来估算物体在不同时间点的高度和速度。"
在计算机科学(cs)领域,特别是在信号处理和控制理论中,卡尔曼滤波是一种广泛应用的算法,用于从存在噪声的数据中提取最优化的估计。在这个问题中,我们关注的是一个自由落体的物体,其高度和速度随着时间变化而变化。给定的测量数据是物体在不同时间点的高度,这些测量值受到高斯白噪声的影响,即平均值为0,方差为1的随机序列。
首先,定义状态变量为物体在时间k的高度\( h_k \)和瞬时速度\( v_k \)。根据牛顿第二定律(力等于质量乘以加速度),可以建立状态方程,考虑到重力加速度\( g \)的影响(在这个例子中,\( g = 9.80 m/s^2 \))。离散化后的状态转移矩阵描述了状态如何从一个时间步到下一个时间步的变化。
其次,设定测量方程,它反映了我们如何通过传感器获取到物体高度的信息,其中也包含了测量噪声\( V_{k+1} \)。测量方程通常与状态方程一起用于卡尔曼滤波算法中。
卡尔曼滤波算法主要包括以下步骤:
1. **一步预测**(Predict Step):基于上一时刻的估计值和状态转移矩阵,预测下一时刻的状态。
2. **预测方差**:计算预测状态的方差。
3. **滤波增益**(Filtering Gain):根据预测方差和测量方差计算滤波增益,它决定了如何结合预测值和测量值来更新估计。
4. **滤波计算**(Filter Update):通过滤波增益调整预测值,得到当前时刻的最佳估计。
5. **滤波方差**:更新滤波方差,表示下一次预测的不确定性。
初始条件给出了物体的初始高度和速度的期望值及方差。应用这个算法,可以得到物体在每一时间步的高度和速度的最优估计,从而减小了噪声影响,提高了估计精度。
这个案例展示了如何运用数学模型(牛顿第二定律)和统计方法(卡尔曼滤波)解决实际问题,尤其是在存在噪声数据的情况下进行动态系统状态的估计。这对于飞行器控制、导航系统和其他需要实时估计系统状态的领域具有重要意义。
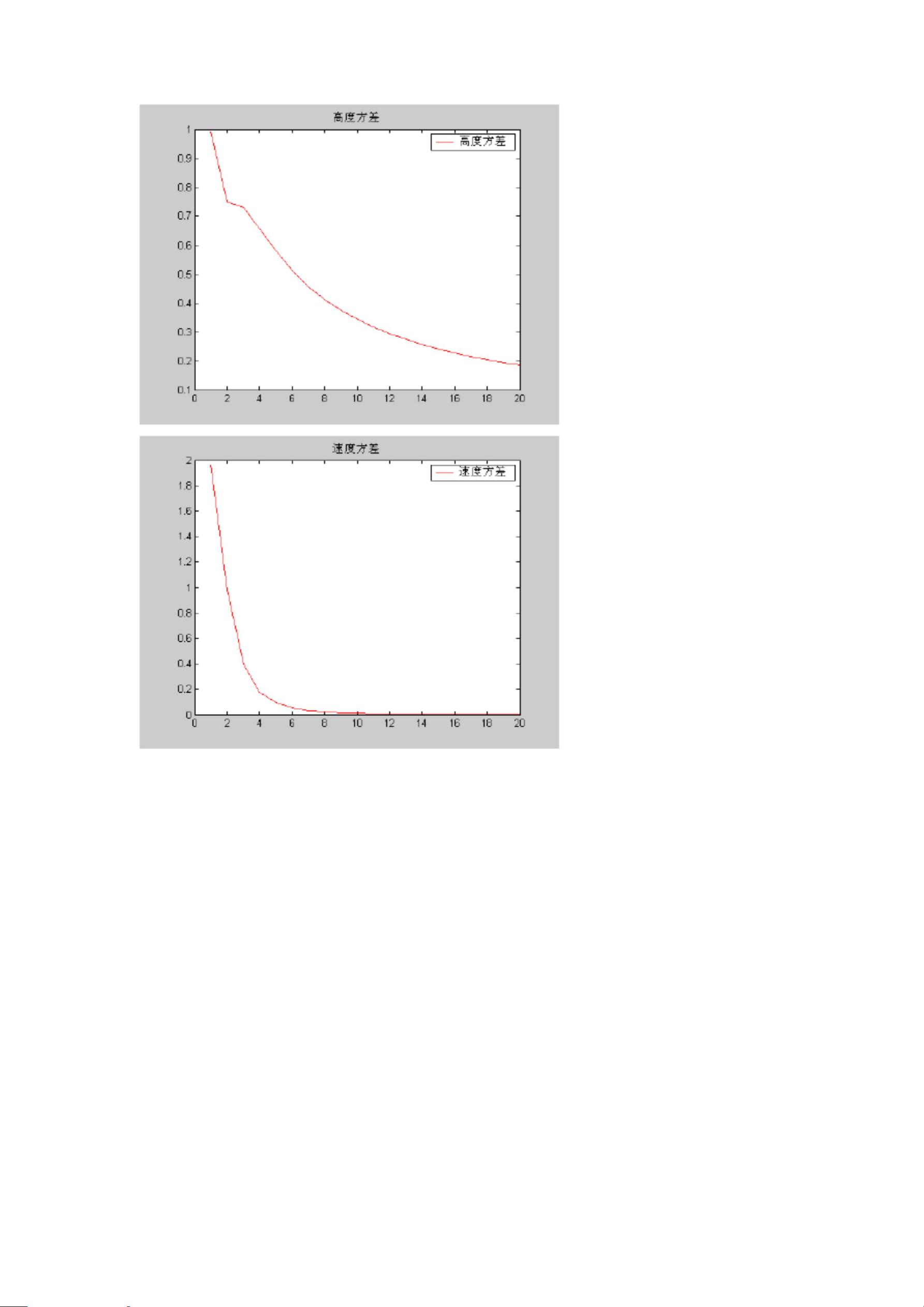
结果分析:
此题中我们利用初值 X
^
^
(k)
述算法给出的 X
将不是 X(k)的最优估计。并且此时,滤波还可能发散。这时我们可以采
剩余15页未读,继续阅读
2022-07-01 上传
2021-11-14 上传
2021-10-14 上传
2022-04-14 上传
2021-09-14 上传
2021-10-25 上传
2021-04-20 上传

xxpr_ybgg
- 粉丝: 6726
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
