高级SLAM技术与增强现实应用解析
需积分: 9 89 浏览量
更新于2024-07-09
收藏 10.21MB PDF 举报
"SLAM(Simultaneous Localization And Mapping,同时定位与建图)是计算机视觉和机器人领域的一个核心问题,由德国凯泽斯劳滕大学的Didier Stricker教授在教学PPT中进行讲解。课程涵盖了从基础的相机原理、投影几何学到更高级的SLAM技术、贝叶斯跟踪、EKF(扩展卡尔曼滤波)跟踪、PTAM(Parallel Tracking and Mapping)以及增强现实的应用。"
在这份资源中,教授首先回顾了前期课程的主要内容,包括基础的相机模型和投影几何学,结构从运动(Structure From Motion, SFM),结构化光,密集3D重建,以及深度摄像头的工作原理。这些都是SLAM技术的基础,因为它们涉及到如何理解摄像头捕获的图像并从中提取三维信息。
SLAM技术的目标是在未知环境中同时确定机器人或设备的位置并构建环境的地图。PPT的第四页提到了“结构与运动”(SAM)的概念,这是SLAM的核心所在,既要重建稀疏场景几何,也要追踪摄像头的运动轨迹。在离线情况下,如用于密集3D模型重建时,所有图像可以一次性处理;而在在线情况下,SLAM必须实时处理新接收的图像信息,比如用于导航或增强现实应用。
接着,课程深入到更高级的SLAM技术,如贝叶斯跟踪和EKF跟踪,这两种方法都是估计理论中常用的状态估计技术,用于处理SLAM中的不确定性。贝叶斯跟踪利用概率模型来更新对系统状态的理解,而EKF则是非线性系统的经典滤波器,适用于SLAM中对连续动态系统的估计。
此外,PTAM是一种并行追踪与映射算法,它将SLAM任务分解为两个并行过程:追踪(保持摄像头的局部运动估计)和映射(构建环境的全局视图)。这种分离处理方式提高了实时性能。
最后,教授还探讨了SLAM在增强现实(AR)中的应用,AR技术通过在真实世界中叠加虚拟信息来丰富用户的感知体验,SLAM技术在这里的作用是确保虚拟元素准确地与现实世界同步和交互。
这份教学PPT提供了一个全面的SLAM学习框架,涵盖了从基本概念到实际应用的各个方面,对于理解机器人和计算机视觉领域的这一关键技术非常有帮助。
INFORMATIK
11
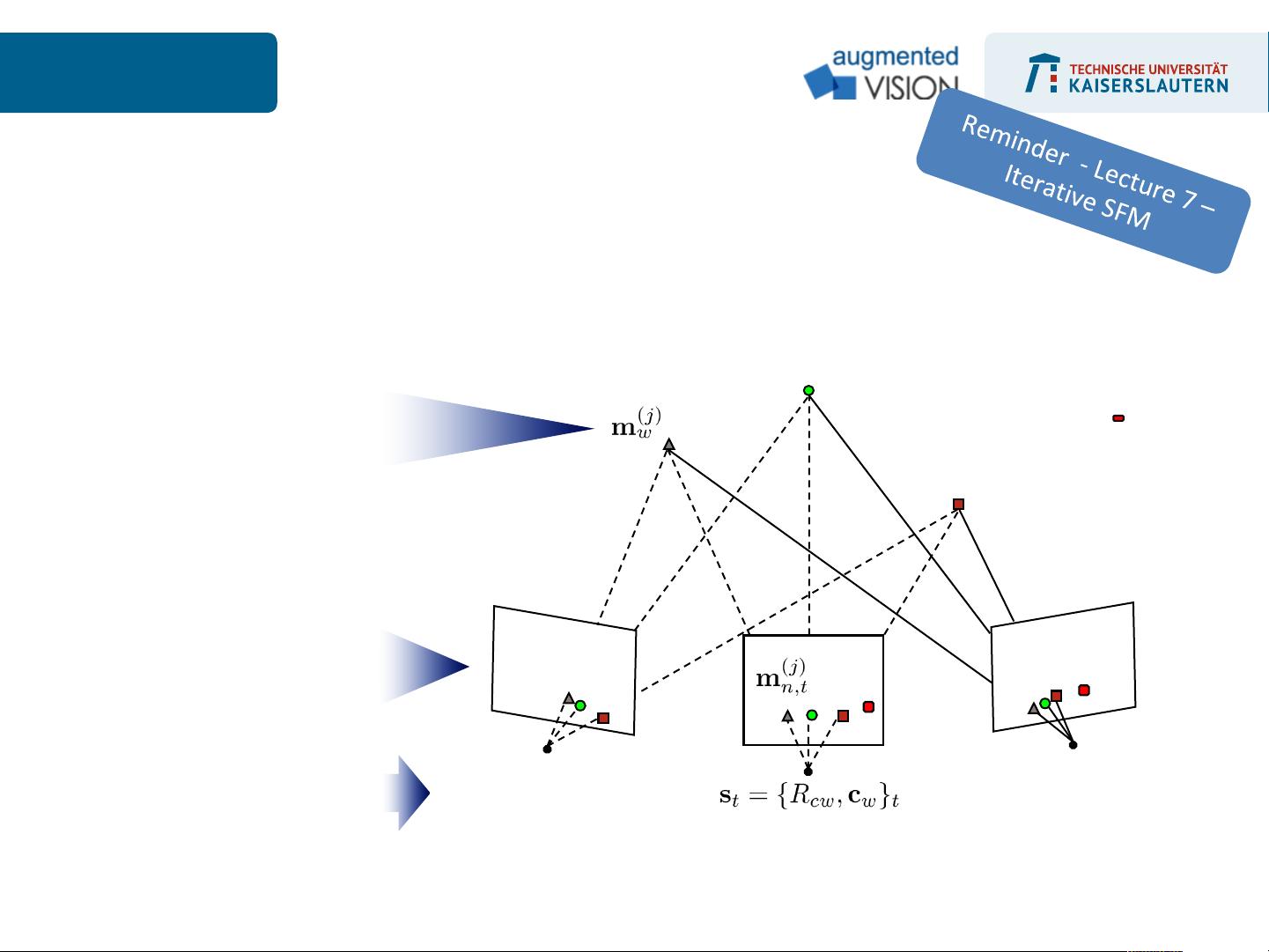
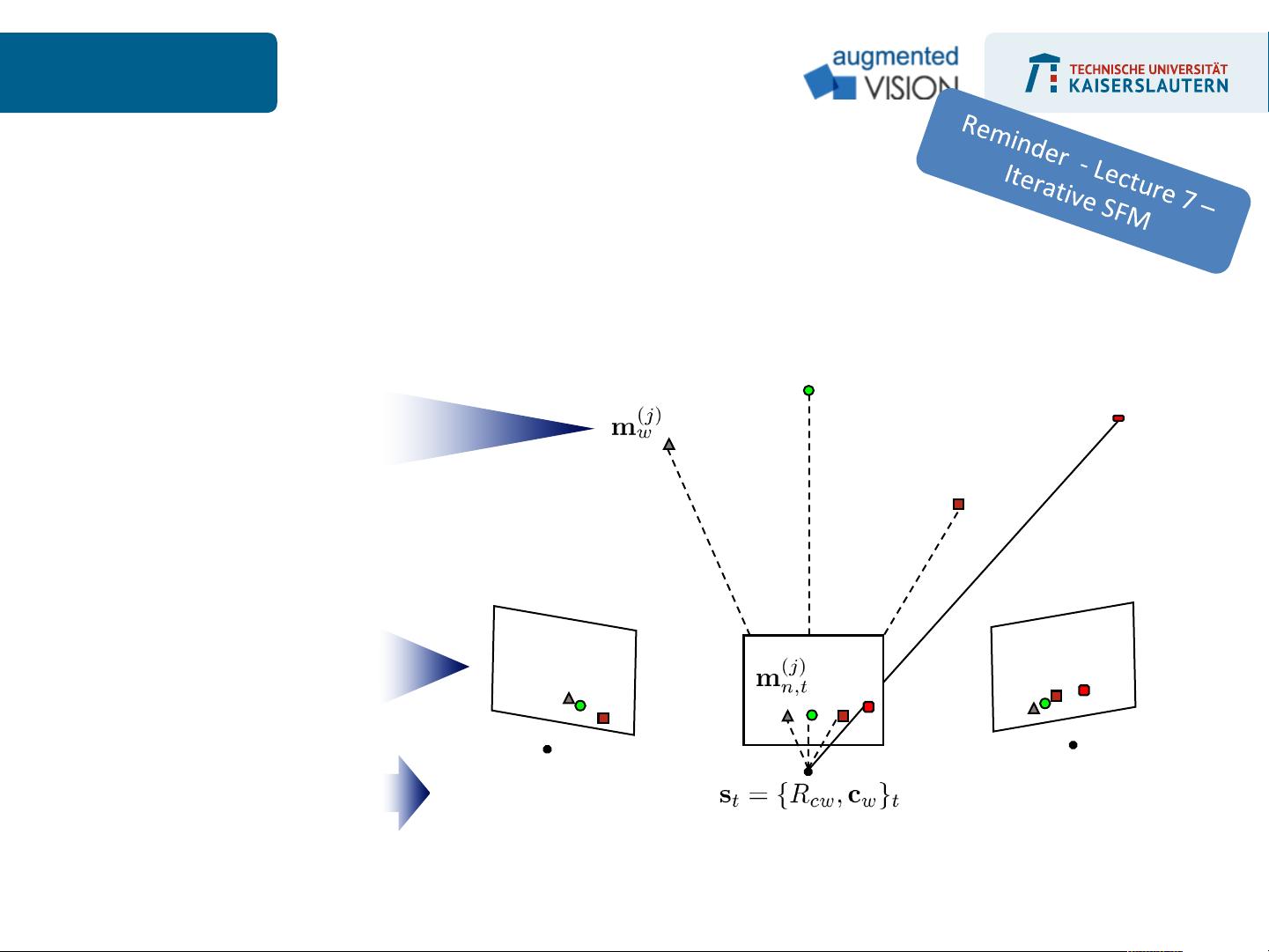
§ Alternating estimation of camera poses and 3D feature locations
(triangulation) from a (continuous) image sequence.
Online structure and motion
(calibrated case)
Camera pose
2D feature location
(from image processing)
3D feature
location
Refine known 3D points with new
camera poses
! " #
! "$2
! " 3
剩余60页未读,继续阅读
2021-07-27 上传
2019-08-20 上传
2018-03-21 上传
2022-03-30 上传
2023-05-08 上传
2019-03-21 上传
2021-05-04 上传

gongzi123
- 粉丝: 34
- 资源: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- Vectorized Analytic Two Body Propagator (Kepler Universal Variables):解析传播例程使用通用变量求解所有轨道类型的单一公式-matlab开发
- kodluyoruz-frontend-odev4:我们正在编写前端教育中的第四个作业
- clo::giraffe:Clo-命令行目标-可以进行验证以避免常见错误的CLI命令,参数和标志
- COVID19_Italy
- 泛域名PHP镜像克隆程序
- Accuinsight-0.0.194-py2.py3-none-any.whl.zip
- keensyo.github.io
- fusioninventory:管理FusionInventory代理安装和配置的角色
- node-child-service:运行和监控子进程
- laravel-pt-rules:与葡萄牙有关的验证规则
- vuex-store-tools:without快速建立Vuex商店...无需样板
- SS_Practica1
- buildroot-external-microchip:Microchip SoC(又名AT91)的Buildroot外部
- 数据库表结构对比工具.zip
- Tarkov
- Fark Nag Eliminator-crx插件
