"MATLAB设计与仿真:三环控制系统实现张力稳定"
 已收录资源合集
已收录资源合集
三环控制系统的MATLAB设计与仿真是针对在轧钢、造纸、纺织、印染和化纤生产等领域中的加工物卷绕过程中的张力控制需求而设计的一种控制方法。在这些工业生产过程中,加工物通常是带状的,并且需要卷绕成圆筒形。为了确保加工物能够持续传送,并且不会堆叠或拉断,需要建立适当的张力并保持恒定。为了实现这一目的,通常会采用张力控制系统,其中包括转速控制、电流控制以及一个额外的张力环,形成了三环控制系统。
张力控制系统的基本要求是能够持久地控制料带在设备上输送时的张力。这种控制必须对机器的任何运行速度都有效,包括加速、减速和匀速,甚至在紧急停车的情况下也要能够确保料带不会受到破损。根据控制方式的不同,张力控制可以分为手动张力控制、开环式半自动张力控制和闭环式全自动张力控制三类。闭环式全自动张力控制是目前较为先进的一种控制方法,它利用张力传感器测量料带的实际张力值,并将张力数据转换成张力信号反馈给张力控制器。通过与控制器预设的张力值进行比较,计算出控制信号并传递给自动控制执行单元,以保持实际张力值与预设张力值相等,从而实现张力的稳定控制。
在工程自动控制中,有三种张力控制系统方法,包括直接法张力控制系统、间接法张力控制系统和复合张力控制系统。直接法张力控制系统是根据张力偏差进行调节的闭环控制系统,采用此系统可以直接控制材料的张力。间接法张力控制系统是通过控制速度和密度等参数来间接地控制张力。复合张力控制系统结合了直接法和间接法,利用两种方法共同控制张力,以达到更精确的控制效果。
在进行三环控制系统的设计和仿真时,通常会使用MATLAB软件。MATLAB是一种功能强大的数学计算软件,具有丰富的工具箱和函数库,可以进行各种数学运算、信号处理和数据分析。通过使用MATLAB软件,可以方便地进行系统的建模和仿真,以验证系统设计的有效性和性能。
在进行三环控制系统的MATLAB设计与仿真时,一般需要按照以下步骤进行:
1. 系统建模:根据系统的实际情况和需求,将系统抽象为数学模型。根据张力控制系统的特点和要求,可以选择适当的控制方法和模型。
2. 控制器设计:根据系统的数学模型和控制要求,设计合适的控制器。可以使用PID控制器、模糊控制器、自适应控制器等不同类型的控制器,并根据实际情况进行参数调节。
3. 仿真验证:利用MATLAB软件进行系统的仿真验证。将系统的数学模型导入MATLAB环境中,设置仿真参数,运行仿真程序,并分析仿真结果。通过仿真,可以评估系统的性能和稳定性,并进行必要的调整和改进。
4. 性能分析:根据仿真结果进行性能分析,评估系统的控制效果和响应特性。可以通过控制误差、稳态误差、过渡过程和频率响应等指标进行评估和比较。
通过以上步骤,可以完成三环控制系统的MATLAB设计与仿真。这个过程可以帮助工程师更好地理解和掌握系统的控制原理,并根据仿真结果对系统进行优化和改进。同时,也可以为实际系统的实施提供重要的参考和指导。
总之,三环控制系统的MATLAB设计与仿真是一种应用于轧钢、造纸、纺织、印染和化纤生产等领域中的张力控制方法。通过使用MATLAB软件进行系统建模、控制器设计和仿真验证,可以有效地实现对张力的稳定控制,并满足工业生产过程中对张力控制的要求。这种设计与仿真方法可以帮助工程师更好地理解和分析系统的性能,为实际系统的设计和优化提供参考和指导。
2.1.3 稳态工作点和稳态参数计算
由图 2-4 可以看出,双闭环调速系统在稳态工作中,当两个调节器都不饱和时,
各变量之间有下列关系
(2-3)
(2-4)
(2-5)
上述关系表明,在稳态工作点上,转速 是由给定电压 决定的,ASR 的输
出量 是由负载电流 决定的,而控制电压 的大小则同时取决于 和 ,
或者说,同时取决于 和 。这些关系反映了 PI 调节器不同于 P 调节器的特点。
P 调节器的输出量总是正比于其输入量,而 PI 调节器则不然,其输出量在动态过程
中决定于输入量的积分,到达稳态时,输入为零,输出的稳态值与输入无关,而是
由它后面环节的需要决定的。后面需要 PI 调节器提供多么大的输出值,它就能提供
多少,直到饱和为止。
鉴于这一特点,双闭环调速系统的稳态参数计算与单闭环有静差系统完全不同,
而是和无静差系统的稳态计算相似,即根据各调节器的给定与反馈值计算有关的反
馈系数:
转 速 反 馈 系 数 (2-6)
电 流 反 馈 系 数 (2-7)
两个给定电压的最大值 和 由设计者选定,受运算放大器的允许输入电
压和稳压电源的限制。
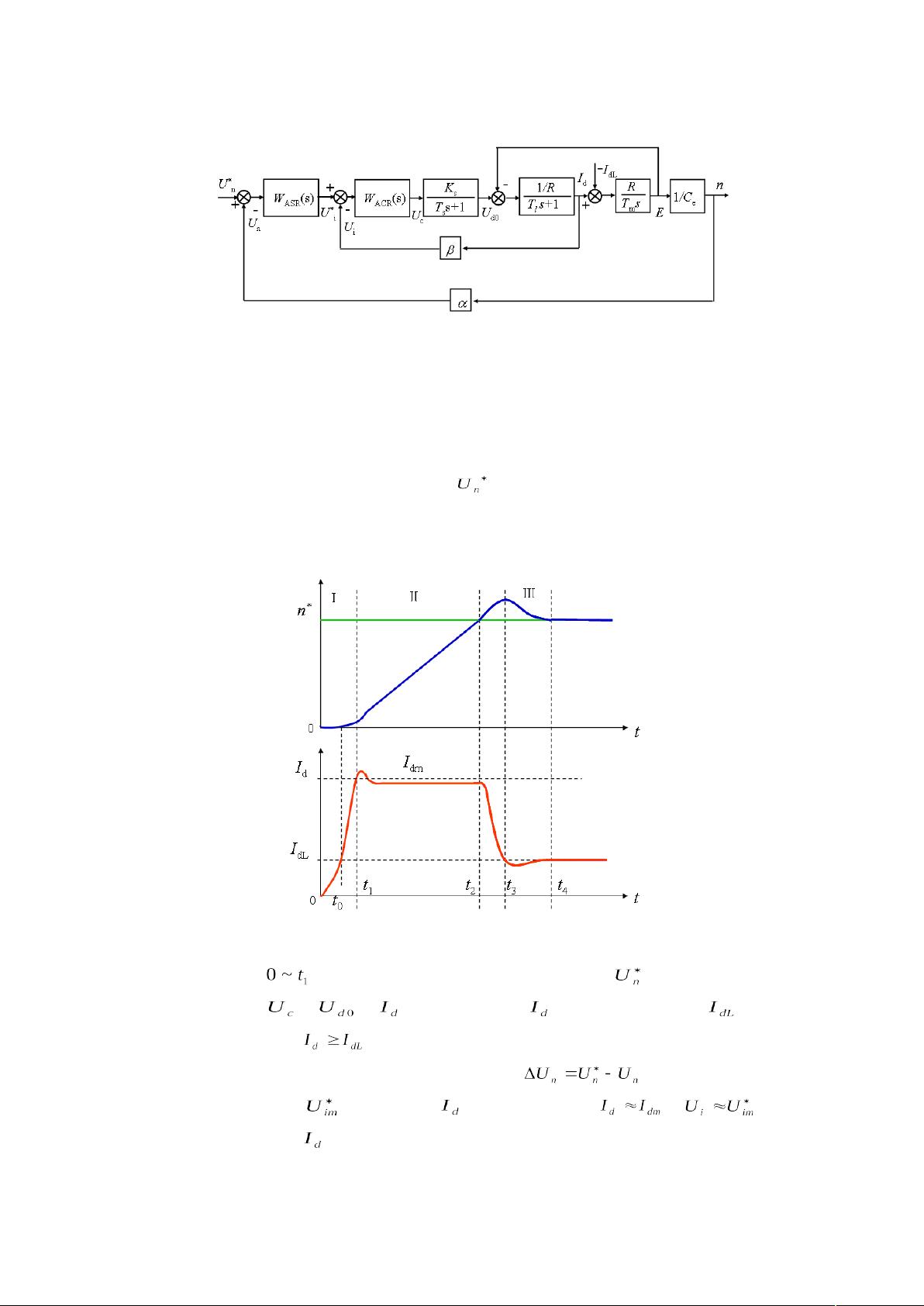
2.2 双闭环直流调速系统的数学模型和动态性能
2.2.1 双闭环直流调速系统的动态数学模型
在单闭环调速系统动态数学模型的基础上,考虑双闭环控制的结构(见图 2-4)
即可绘出双闭环直流调速系统的动态结构图,如图 2-6 所示。图中 和
分别表示转速调节器和电流调节器的传递函数。为了引出电流反馈,电动
机的动态结构图中必须把电枢电流 显露出来。
10
剩余54页未读,继续阅读
相关推荐





wyfncut
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Log4net详解:强大的.NET日志组件
- C语言编程实践:100例题解析与薪酬计算
- DWR入门配置与使用详解
- JAVA代码复查工具Checkstyle与Findbugs使用手册
- IxChariot网络性能测试工具介绍
- Linux命令大全:必知必会的实用工具
- H264低码流下H1264半脆弱盲水印算法设计与实现
- 互联网搜索引擎:工作原理与技术探索
- 数据库管理系统的数据字典:关键组件与存取机制
- HTML标签全览:从基础到高级
- 华为硬件工程师手册:规范化开发与职责解析
- Linux操作系统必备命令详解
- OpenLogic的Hibernate深度解析:对象关系映射与实践
- UML精華第三版:快速掌握物件模型語言标准
- Linux系统裁剪教程:打造个性化小型系统
- 精通Perl编程:深入指南
