Catia DMU 运动分析教程:从入门到精通
下载需积分: 9 | DOC格式 | 407KB |
更新于2024-09-12
| 115 浏览量 | 举报
"本资源是关于CATIA DMU空间运动分析的学习资料,主要面向初学者,旨在帮助理解并掌握如何在Catia V5R12的DMU Kinematics模块下进行运动分析。"
CATIA DMU空间运动分析是产品设计中的重要环节,它允许用户模拟和验证机械系统的运动行为,确保设计的可行性。以下将详细阐述这个模块的一些核心知识点:
1. **创建机构**
在进行运动分析前,首先要构建机构。机构由多个部件组成,其中至少包含一个固定件作为参考基准。通过选择“Fixed Part”命令,选取模型中的部件作为固定件,该部件在分析中不会发生位移,为其他部件提供运动框架。
2. **定义约束**
- **约束类型**:Catia V5提供了丰富的约束类型,包括铰接副、棱柱副、圆柱副等,以模拟不同的连接方式。例如:
- 铰接副(Revolute):允许部件绕一轴线旋转,提供1个旋转自由度。
- 棱柱副(Prismatic):允许部件沿一方向平移,提供1个移动自由度。
- 圆柱副(Cylindrical):结合了旋转和移动,提供1个旋转和1个移动自由度。
- 等其他约束,如万向副、滚动曲线副等,分别用于复杂连接情况。
- **约束应用**:正确选择和应用约束至关重要,这需要根据实际设计需求来判断和设置。例如,使用“驱动命令类型”可以指定是通过角度还是长度来驱动运动,某些约束如万向副可能需要两个回转体作为连接。
3. **运动分析过程**
- **添加运动副**:选择合适的约束类型,然后在几何模型或树形图中选取需要约束的部件和对应特征,添加约束。
- **设定驱动参数**:为每个约束设置驱动参数,例如,设定铰接副的旋转角度,棱柱副的移动距离等。
- **运行仿真**:完成所有约束定义后,执行运动分析,观察部件的运动状态,确认是否符合预期。
- **检查与优化**:分析结果可能需要调整,如发现干涉或不符合运动要求,可返回修改约束条件或部件位置,直至达到满意效果。
4. **高级功能**
- **动力学分析**:除了静态运动分析,还可以进行动力学分析,考虑力、扭矩等因素对机构运动的影响。
- **多机构分析**:处理包含多个相互作用的子系统,分析整个系统的协同运动。
- **模拟控制**:模拟控制系统的输入和输出,如电机、液压或气压系统,以验证控制系统的效果。
CATIA DMU空间运动分析模块提供了一个强大的工具,帮助设计师在设计阶段就能预估和验证产品的动态性能,从而减少实物原型测试的需求,提高设计效率和质量。通过深入理解和熟练运用这些知识点,设计师能够创建出更为精确和可靠的机械系统模型。
运动分析的一般步骤
运动分析在 Catia V5 R12 中的 DMU Kinematics 模块下的一般步骤
1.创建机构
运动分析不是针对单个实体的分析,而是针对一个或多个机构的分析,所
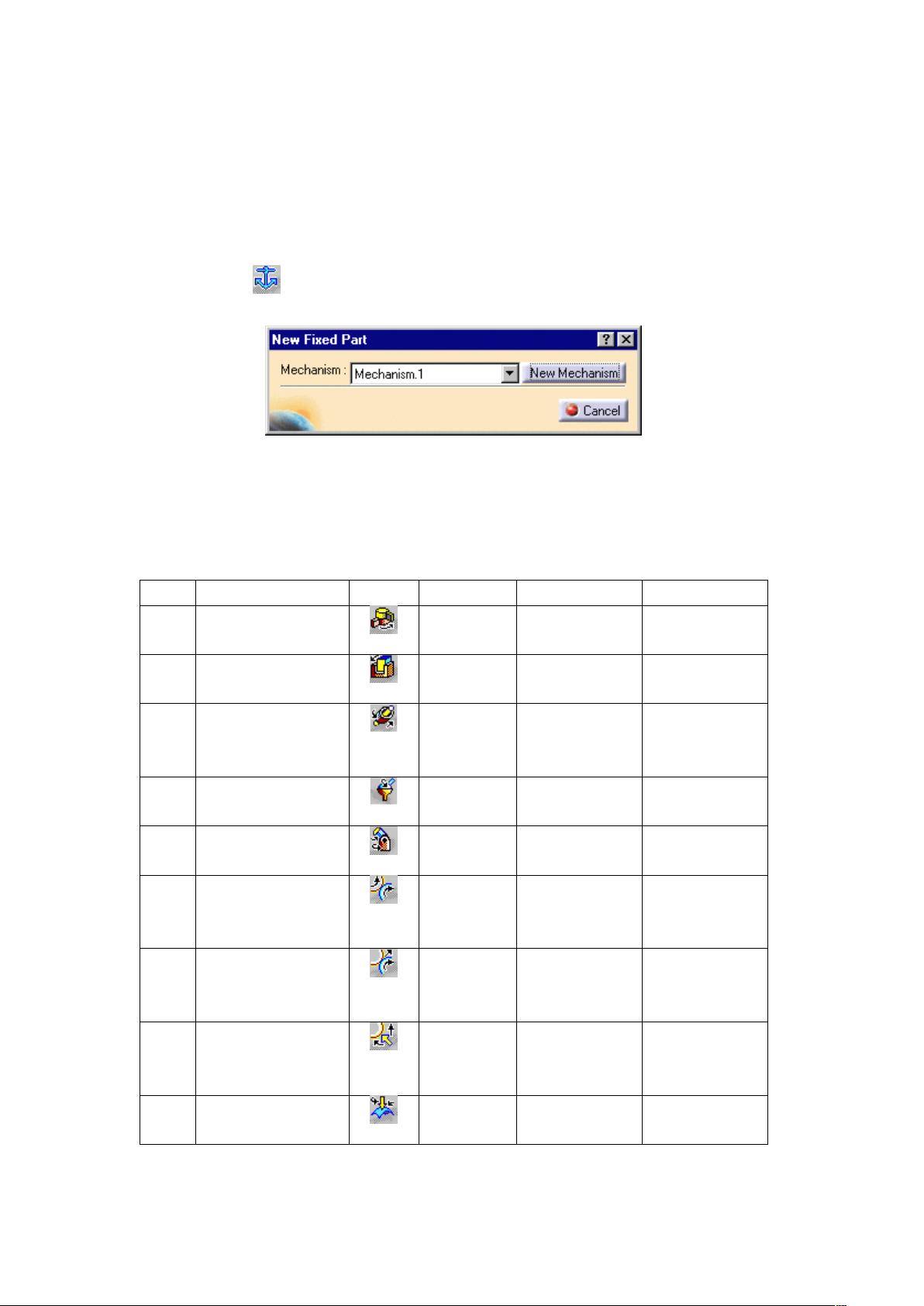
以应该先确定一个机构。通常先确定一个固定件,否则机构是不能运动的。点
击 Fixed Part 命令,出现如下对话框:
在几何模型区,或者树形图上选择想要固定的部件,这时定义好的机构自
动出现在树形图上。
2.定义约束
依据下表选择合适正确的运动副。
Catia V5 提供了 16 种不同形式的约束,如下表:
序号 约束类型 图标 自由度 驱动命令类型 需要条件
1
铰接副 Revolute 1 个旋转 角度 2 轴线+2 平面
2
棱柱副 Prismatic 1 个移动 长度 2 直线+2 平面
3
圆 柱 副
Cylindrical
1 个 旋
转、1 个移
动
角 度 加 长度,
角度或长度
2 轴线
4
球头副 Spherical 3 个旋转
—
2 点
5
万向副 U Joint 2 个旋转
—
2 回 转 体 ( 轴
线)
6
滚 动 曲 线 副 Roll
Curve
1 个 旋
转、1 个移
动
长度 2 曲线
7
滑 动 曲 线 副 Slide
Curve
2 个 旋
转、1 个移
动
—
2 曲线
8
点 和 曲 线 副 Point
Curve
3 个 旋
转、1 个移
动
长度 1 点+1 曲线
9
点 和 表 面 副 Point
Surface
3 旋 转、2
个移动
—
1 点+1 平面
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐




u010183641
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Subclipse 1.8.2版:Eclipse IDE的Subversion插件下载
- Spring框架整合SpringMVC与Hibernate源码分享
- 掌握Excel编程与数据库连接的高级技巧
- Ubuntu实用脚本合集:提升系统管理效率
- RxJava封装OkHttp网络请求库的Android开发实践
- 《C语言精彩编程百例》:学习C语言必备的PDF书籍与源代码
- ASP MVC 3 实例:打造留言簿教程
- ENC28J60网络模块的spi接口编程及代码实现
- PHP实现搜索引擎技术详解
- 快速香草包装技术:速度更快的新突破
- Apk2Java V1.1: 全自动Android反编译及格式化工具
- Three.js基础与3D场景交互优化教程
- Windows7.0.29免安装Tomcat服务器快速部署指南
- NYPL表情符号机器人:基于Twitter的图像互动工具
- VB自动出题题库系统源码及多技术项目资源
- AndroidHttp网络开发工具包的使用与优势
