ISO ADAS LSF功能详解:低速跟随与自动化控制标准
需积分: 20 50 浏览量
更新于2024-07-17
1
收藏 10.15MB PDF 举报
ADAS功能标准分析4-LSF.pdf文档深入探讨了先进的驾驶辅助系统(Advanced Driver Assistance Systems, ADAS)中的关键功能之一——低速跟随(Low Speed Following, LSF)。该标准文件由ISO制定,专注于车辆在低速行驶时如何通过集成多种传感器信息来实现对前方车辆的自动适应性控制。
首先,文档详细介绍了LSF的基本概念。低速跟随的主要目的是通过集成技术,如雷达、摄像头和超声波传感器,来收集前方车辆的距离、速度以及车辆自身的运动数据,同时考虑驾驶员的意图。这些信息被输入到一个称为“LSF控制策略”的控制器中,该控制器负责根据获取的数据制定并执行车辆的纵向控制策略,确保安全地保持与前车的距离,同时向驾驶员提供实时的状态反馈,如速度调整、保持警报等。
在功能分解中,文档提到了以下几个主要部分:
1. **ACC(Adaptive Cruise Control)**:即自适应巡航控制,负责在高速公路上维持恒定的跟车距离,无需持续踩油门或刹车。
2. **FCW(Forward Collision Warning)**:前方碰撞预警,通过预测与前方车辆或障碍物的潜在碰撞风险来提醒驾驶员。
3. **LCA(Lane Change Decision Aid)**:变道辅助,帮助驾驶员判断是否安全进行变道操作。
4. **LSF**:这是文档的核心,如前所述,它在低速行驶时提供辅助,减轻驾驶员的驾驶负担。
5. **FSR(Full Speed Range Adaptive Cruise)**:全速范围自适应巡航控制,扩展了ACC的适用范围至更广泛的车速区间。
6. **FVCM(Forward Vehicle Collision Mitigation)**:前方车辆碰撞缓解,当检测到碰撞风险时,可能采取制动措施减轻碰撞后果。
7. **BSM(Blind Spot Monitoring)**:盲点监测,用于检测车辆侧面的盲区,避免因视野受限导致的事故。
ISO 22178是一个重要的国际标准,它为ADAS系统提供了性能要求和测试方法,确保车辆的主动安全性能得到充分验证。通过遵循这个标准,汽车制造商可以确保其LSF系统符合安全性和用户友好性的标准,从而提高驾驶体验和道路安全性。
ADAS功能标准分析4-LSF.pdf提供了关于低速跟随功能在车辆智能化中的具体实现方式,以及其在汽车工业中的标准化应用,对于理解和评估现代车辆的自动驾驶能力具有重要意义。
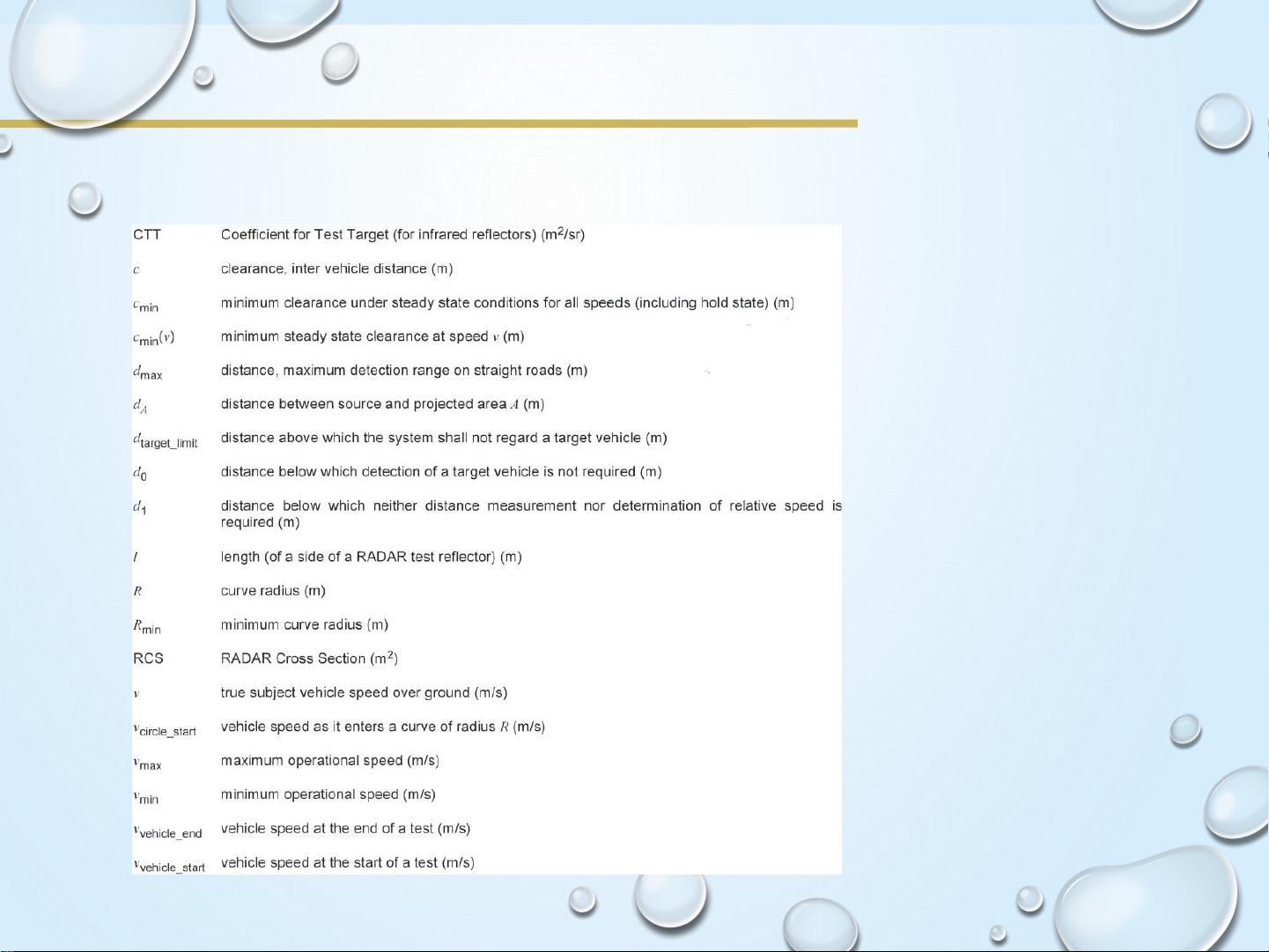
4、ISO 22178 Symbols and abbreviated terms 符号和缩略语
测试目标的系数(用于红外反射器)
净空距离
在所有速度的稳态条件下最小净空距离
在速度的稳态条件下最小净空距离
时间,开始测试
源和目标平面A之间的距离
系统不应考虑目标车辆的距离
低于检测目标车辆需要
低于测距或相对速度速需要
长度 (雷达测试反射器的一侧)
曲率半径
最小曲率半径
雷达截面
主体车辆相对地面的实际速度
车辆进入半径为R的曲线时的速度
最大车辆运行速度
最小车辆运行速度
车辆在测试结束时的速度
车辆在测试结束时的速度
彭小权
ppxx1@163.com
4、LSF Low Speed Following
剩余29页未读,继续阅读
2052 浏览量
366 浏览量
272 浏览量
2024-07-21 上传
136 浏览量
696 浏览量
2023-12-18 上传

hitbuyi
- 粉丝: 5
- 资源: 48
 我的内容管理
展开
我的内容管理
展开







最新资源
- rt-thread-code-stm32f407-atk-explorer.rar探索者 STM32F407 是正点原子
- Winsoft WebView v6.6 for Delphi & CB
- nacos-server-2.3.0压缩包
- EMS Advanced Data Export 4.17.0.5 D12.rar
- 帕金森患者数据帕金森患者数据
- DOCXReadWrite D11 D12.7z
- Easy Save - The Complete Save Data Serializer System 3.5.6
- PyCharm安装教程
- 哈工大-操作系统-考试
- 机器学习实验所需内容.zip
- 哈工大计算机操作系统历年试题(含答案哦)
- 湖南科技大学计算机组成原理课设
- DelphiVCL4Python-main.zip
- 微信小程序设计-健康菜谱.zip
- 微信小程序设计-笑话.zip
- 微信小程序设计-V2EX社区小程序.zip
