H2/H∞混合控制在主动悬架系统中的应用
需积分: 31 75 浏览量
更新于2024-08-12
收藏 710KB PDF 举报
主动悬架的H2/H∞混合输出反馈控制是一种先进的车辆悬架控制系统设计方法,它结合了H2范数和H∞范数理论,旨在优化车辆的乘坐舒适性和操作稳定性,尤其是在面对模型不确定性的情况下。该技术由胡爱军和孔令强在2014年的论文中提出,并基于线性分式变换(LFT)建立了包含不确定参数的半车悬架系统模型。
线性分式变换是控制理论中的一种工具,用于处理具有不确定性或参数变化的动态系统。在这个模型中,研究人员考虑了汽车悬架系统可能存在的各种不确定性,如汽车簧载质量、轮胎刚度等因素的变化。这些不确定性可能导致实际系统行为与理想模型存在偏差。
为了确保系统的鲁棒稳定性,即在不确定参数的影响下仍能保持稳定,论文采用了H∞范数作为性能指标。H∞控制的目标是限制不确定参数对系统性能的最大影响,通过最小化H∞范数,可以确保系统在扰动下的稳定性。同时,为了衡量悬架系统在外界扰动(如路面不平度)作用下的性能,H2范数被用来评估系统的能量输出。H2范数关注的是系统对扰动的响应强度,一个较小的H2范数意味着更好的乘坐舒适性。
设计的H2/H∞混合控制器兼顾了这两个性能指标,使得悬架系统既具有良好的鲁棒稳定性,又能保持较高的性能水平。通过在Matlab 7.0/Simulink环境下建立的仿真模型,研究人员能够分析和验证控制器的效果。仿真的结果表明,采用主动悬架并应用H2/H∞混合控制的车辆,其乘坐舒适性和操作稳定性都显著优于传统的被动悬架系统。
这一研究对于汽车悬架控制领域的贡献在于,它提供了一种更全面的控制策略,考虑了实际系统中的不确定性,并通过混合H2/H∞控制方法提高了控制性能。然而,早期的研究中,高阶未建模不确定性对模型不确定性的描述可能不够精确,而文献中的H2/H∞混合控制器设计则尝试弥补了这方面的不足,尽管仍有提升空间。
主动悬架系统是现代汽车技术的一个重要进步,它通过实时调整悬架的阻尼和弹簧特性来改善车辆的行驶性能。而H2/H∞混合控制技术的引入,不仅提升了主动悬架的性能,也为未来汽车悬架系统设计提供了新的思路和方法,对于汽车行业的技术发展具有积极的推动作用。
第 35卷 第 3期
2014年 6月
河 南 科 技 大 学 学 报 :自 然 科 学 版
JournalofHenanUniversityofScienceandTechnology:NaturalScience
Vol.35 No.3
Jun. 2014
基金项目:国家自然科学基金项目(U1204517);河南省教育厅自然科学研究计 划 基金 项 目(2011A460006);河南 理 工大 学 博士 基 金
项目(
B2009-16)
作者简介:胡爱军(1974-),男,河南焦作人,讲师,博士,硕士生导师,研究方向为汽车系统动力学与控制.
收稿日期:2013-09-04
文章编号:1672-6871(2014)03-0027-05
主动悬架的 H
2
/H
∞
混合输出反馈控制
胡爱军,孔令强
(河南理工大学 机械与动力工程学院,河南 焦作 454000)
摘要:运用线性分式变换建立了包含不确定参数的半车 悬架 系 统模 型,选 择合 适 的性 能 加权 函 数得 广 义 被 控
对象。为了保证不确定参数具有鲁棒稳定性,用 H
∞
范数作为参数 不 确定 性 的性 能 指标,同时,为了 使 悬架 系
统性能指标处于一个好的水平,用 H
2
范数作为衡量扰动作用下悬架性能指标,设计了 H
2
/H
∞
混合控制器。 在
Mtalab7.0/Simulink环境下搭建仿真模型完成对系统的 仿 真 分 析。 仿 真 结 果 证 明:主 动 悬 架 的 乘 坐 舒 适 性 明
显优于被动悬架的乘坐舒适性,同时汽车的操作稳定性也有一定程度的改善。
关键词:主动悬架;不确定性;鲁棒控制;仿真
中图分类号:U461.4 文献标志码:A
0 引言
汽车悬架系统是现代汽车的重要组成部分,对汽车的行驶平顺性 以 及 操 作 稳 定 性 等 性 能 指 标 有 着
重要的影响。目前,人们对悬架的设计开发工作主要集中在对控制 策 略 的 研 究 方 面,如遗 传 算 法、滑模
控制、模糊控制等
[1-3]
。这些算法一般没有考虑模型的不确定性问题,实际上悬架系统存在诸多不确定
的因素,比如汽车簧载质量、轮胎刚度
[4]
等因素都会产生一些变动。文献[5]建立了考虑高阶未建模不
确定性的汽车悬架模型,设计了 H
2
/H
∞
混合控制器,一定程度上提高了悬架模型的精度,但高阶未建模
不确定性对模型不确定性的描述不够精确,所建的模型过于简单,很多性能不能表达出来。文献[6]应
用硬约束、H
2
性能、H
∞
性能以及极点配 置等多 约 束设计 了 主动悬 架 H
2
/H
∞
混合 控 制器,但没有 考 虑模
型的不确定性问题。为了能够准确表达悬架模型的不确定性,本文 运 用 线 性 分 式 变 换 (LFT)建立了包
含不确定参数的主动悬架 LFT模型,同时为了体现更多悬架性能建立了 1/2车体悬架模型。汽车悬架
设计时应考虑乘坐舒适性、操作稳定性以及机械约束 3项指标
[7]
,而乘坐舒适性主要取决于悬架的垂向
加速度、俯仰角加速度和悬架动挠度,操作稳定性取决于前后轮胎的动载荷。为了使悬架系统性能指标
处于一个好的水平,本文用 H
2
范数作为衡量扰动作用下悬架性能指标,同时为了保证不确定参数具有
鲁棒稳定性,用
H
∞
范数作为参数不确定性的性能指标,运用线性矩阵不等式方法(LMI)设 计 H
2
/H
∞
混
合控制器。
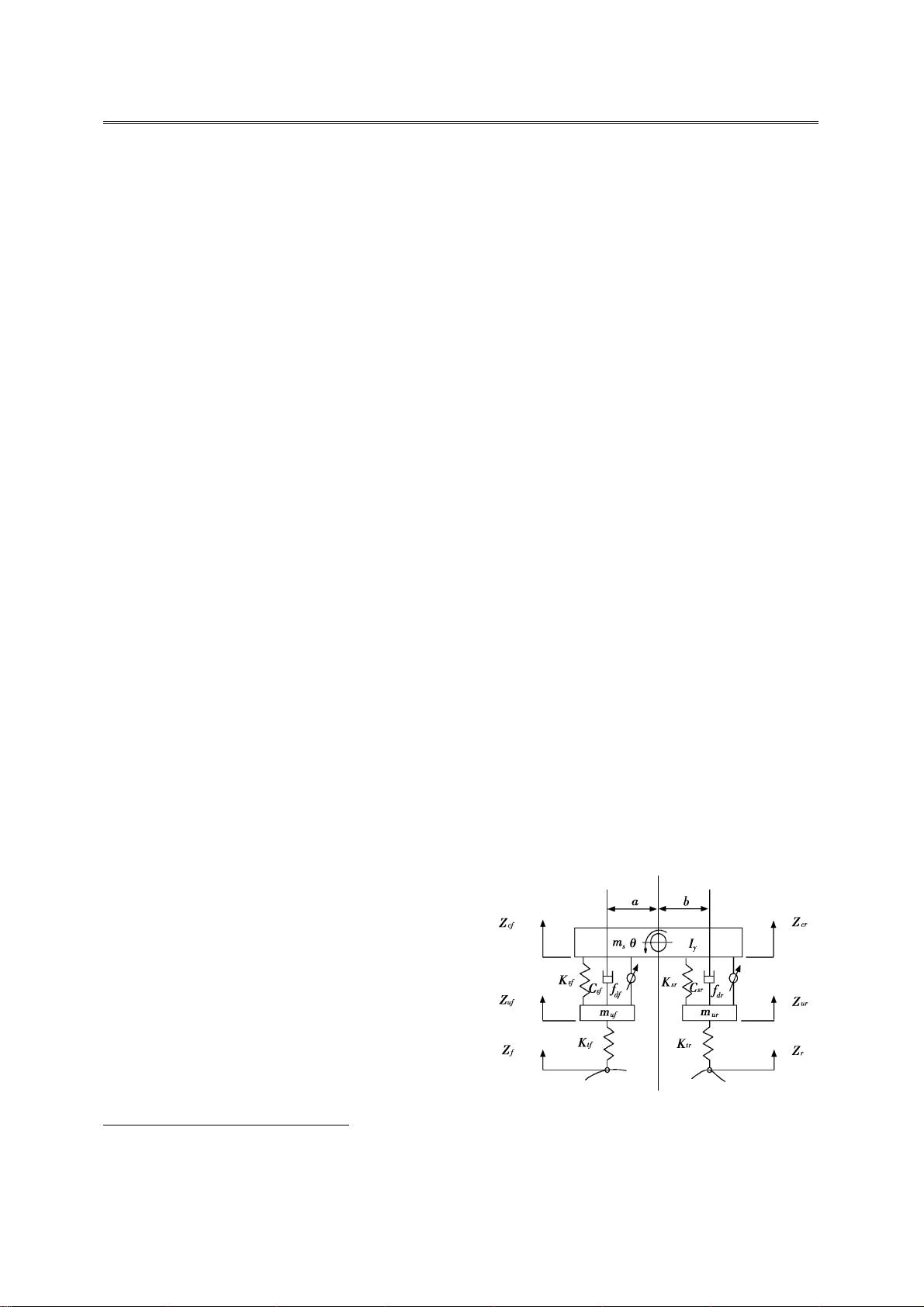
图 1 半车主动悬架系统模型
1 半车悬架模型及不确定性描述
图 1为半车 主 动 悬 架 系 统 模 型。 在 图 1中,m
s
和 I
y
分别表 示 悬 架 簧 载 质 量 和 簧 载 质 量 转 动 惯 量;
Z
cf
、Z
cr
和 Z
uf
、Z
ur
分别 表 示前、后 悬 架簧载 质 量和非
簧载质量位移;Z
f
和 Z
r
分别表示前、后路面位移;K
sf
、
K
sr
分别表示前、后 悬架 刚度;C
sf
、C
sr
分 别 表 示 前、后
悬架阻尼系数;K
tf
、K
tr
分 别 表 示 前、后 轮 胎 的 刚 度 系
数;f
df
、f
dr
分别表示前、后悬可控库仑力;a和 b表示前
后悬架到质心的距离;
θ
表示悬架的俯仰角度。
下载后可阅读完整内容,剩余4页未读,立即下载
210 浏览量
142 浏览量
195 浏览量
139 浏览量
234 浏览量
243 浏览量
130 浏览量

weixin_38653296
- 粉丝: 2
- 资源: 911
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSH整合实例(经实践,可直接套用的)
- Art_of_Java_Web_Development
- 深入浅出ARM7-LPC213X/214X(上)
- SAM和决策树研究应用技术
- AT24C01_CN
- Linux_Systems_Programming
- 单片机80c51外文翻译
- 航天信息开票系统红字发票升级技术服务人员升级维护手册
- 2009年计算机专业考研专业课大纲解析
- CodeVisionAVR C 库函数介绍
- AVR 单片机与GCC 编程
- Apress.LINQ.for.Visual.C.Sharp.2008.Jun.2008 电子版(PDF)
- 关于ACE自适配通信环境的技术文档
- 有关C标准和实现等内容
- C++标准程式库标准程式库
- Groovy_in_Action
