GPS卫星定位原理与应用:静态与动态定位解析
版权申诉
114 浏览量
更新于2024-07-02
收藏 1.02MB PPT 举报
"本资料详细介绍了GPS卫星定位的基本原理,包括静态和动态定位、绝对定位与相对定位等概念,并阐述了定位过程中涉及的几何距离计算和坐标解算方法。"
GPS全球定位系统(Global Positioning System,GPS)是一种基于卫星导航的定位技术,它通过测量地球表面上的接收机与多颗GPS卫星之间的距离来确定接收机的具体位置。第五章"GPS卫星定位基本原理"主要探讨了这一过程的理论和技术细节。
首先,GPS定位的核心是测距交会,即接收机同时接收到四颗或更多GPS卫星的信号,计算出从接收机到每颗卫星的空间距离。这些卫星在地球轨道上运行,它们的精确位置由导航电文提供。通过解算一系列的定位球方程式,可以找出这些距离对应的唯一三维空间点,即接收机的位置。
定位球方程是一个包含接收机到卫星的距离(站星几何距离Dn)和卫星坐标(S(Xs,Ys,Zs))的数学模型,用于求解接收机坐标(P(X,Y,Z))。这个模型基于三角几何原理,考虑到地球曲率和信号传播速度等因素,确保了位置解算的准确性。
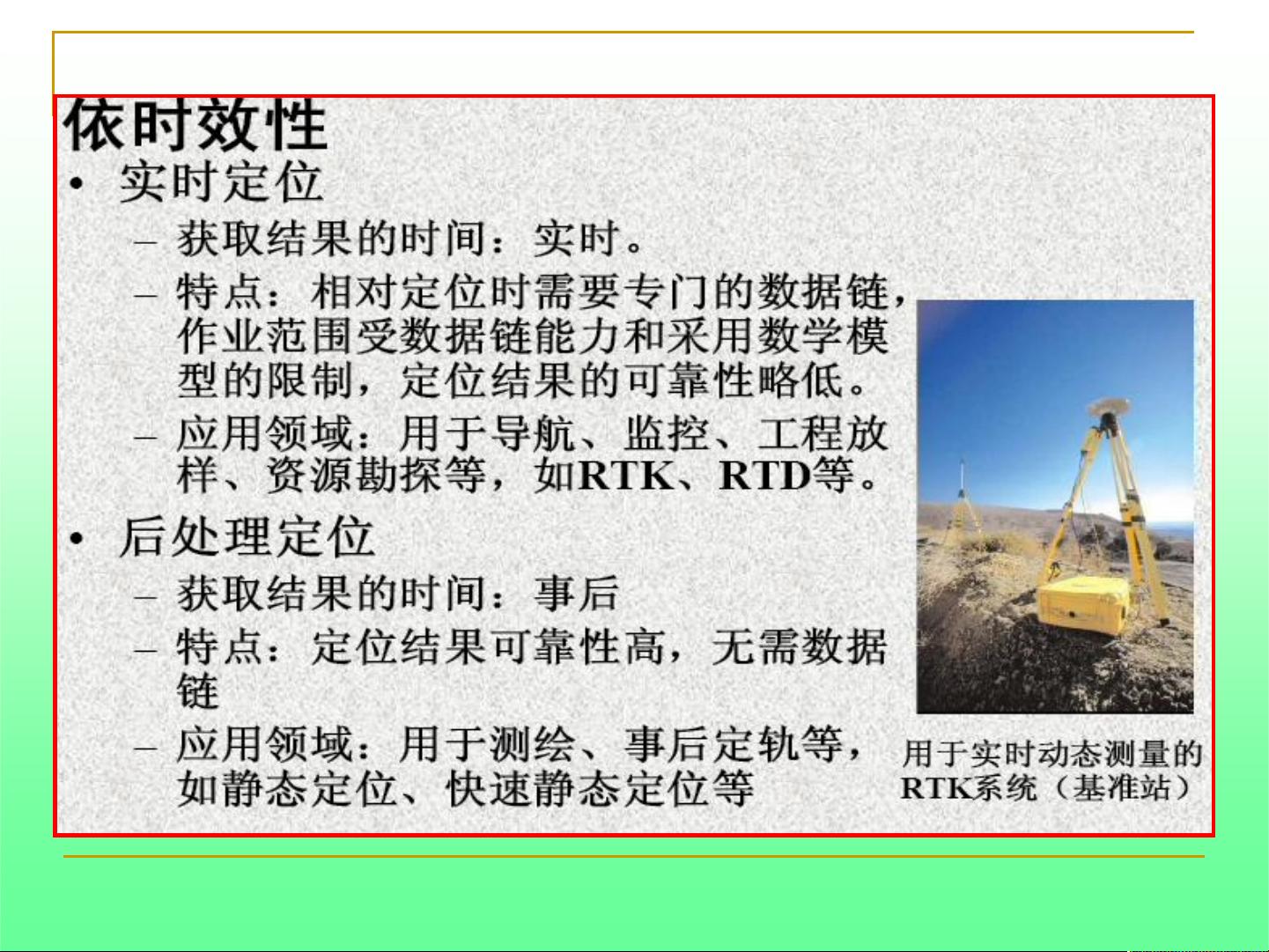
根据接收机在作业时的状态,GPS定位方法可分为两类:静态定位和动态定位。静态定位适用于固定不动的接收机,如地壳形变监测或大地测量,而动态定位则适用于移动中的接收机,如车辆导航或航空测量。
此外,按照参考点的不同,定位方法还可以分为绝对定位和相对定位。绝对定位直接给出接收机在WGS-84坐标系中的绝对位置,适用于广泛的导航和测量应用。相对定位则关注接收机相对于已知参考点的位置,常用于高精度的差分GPS(DGPS)系统,提供更精确的定位结果。
GPS卫星定位原理涉及到天线设计、信号传播、坐标系统、几何距离计算以及误差修正等多个方面。理解这些基本原理对于有效利用GPS技术进行定位、导航和测量至关重要。在实际应用中,结合不同的定位策略和误差处理方法,可以实现从简单导航到高精度测绘的多种功能。
136 浏览量
点击了解资源详情
点击了解资源详情
2022-07-06 上传
131 浏览量
2022-07-06 上传
150 浏览量
162 浏览量

wxg520cxl
- 粉丝: 25
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- O2IXLB_oopJavaGyak:Java任务解决方案
- 拉格朗日插值:是-matlab开发
- MariaDB,mysql 数据库驱动下载
- 木质展示柜3d模型
- KainoAfricaApp:演示我们应用开发的移动应用
- 电信设备-一种具有无线通信功能的LED地埋灯.zip
- 主管会计岗位任务绩效考核指标
- Complete-ML-Coursework
- ema-john-server:heroku部署
- tibia-tools:一组用于胫骨的工具
- 现代家装3D设计
- Husky-开源
- 幅移键控:数字调制 ASK-matlab开发
- Unity 手机震动插件Vibration
- 职位说明书-项目助理DOC
- dotfiles:我的dotfiles
