PLC实现的PID控制器设计与仿真研究
需积分: 10 66 浏览量
更新于2024-09-17
收藏 252KB PDF 举报
"基于PLC的PID控制算法的设计"
在工业自动化领域,PID(比例-积分-微分)控制器因其简洁的算法和良好的控制性能而被广泛应用。本文主要探讨了如何利用可编程逻辑控制器(PLC)来设计和实现PID控制器,以应对实际工业过程中遇到的非线性、时变性问题。
PLC是一种专用的工业计算机,能够实时处理输入/输出信号,用于控制各种机械设备和生产过程。在PID控制器设计中,PLC作为执行平台,能够提供灵活的编程和快速响应的能力,有助于改善控制系统的性能。
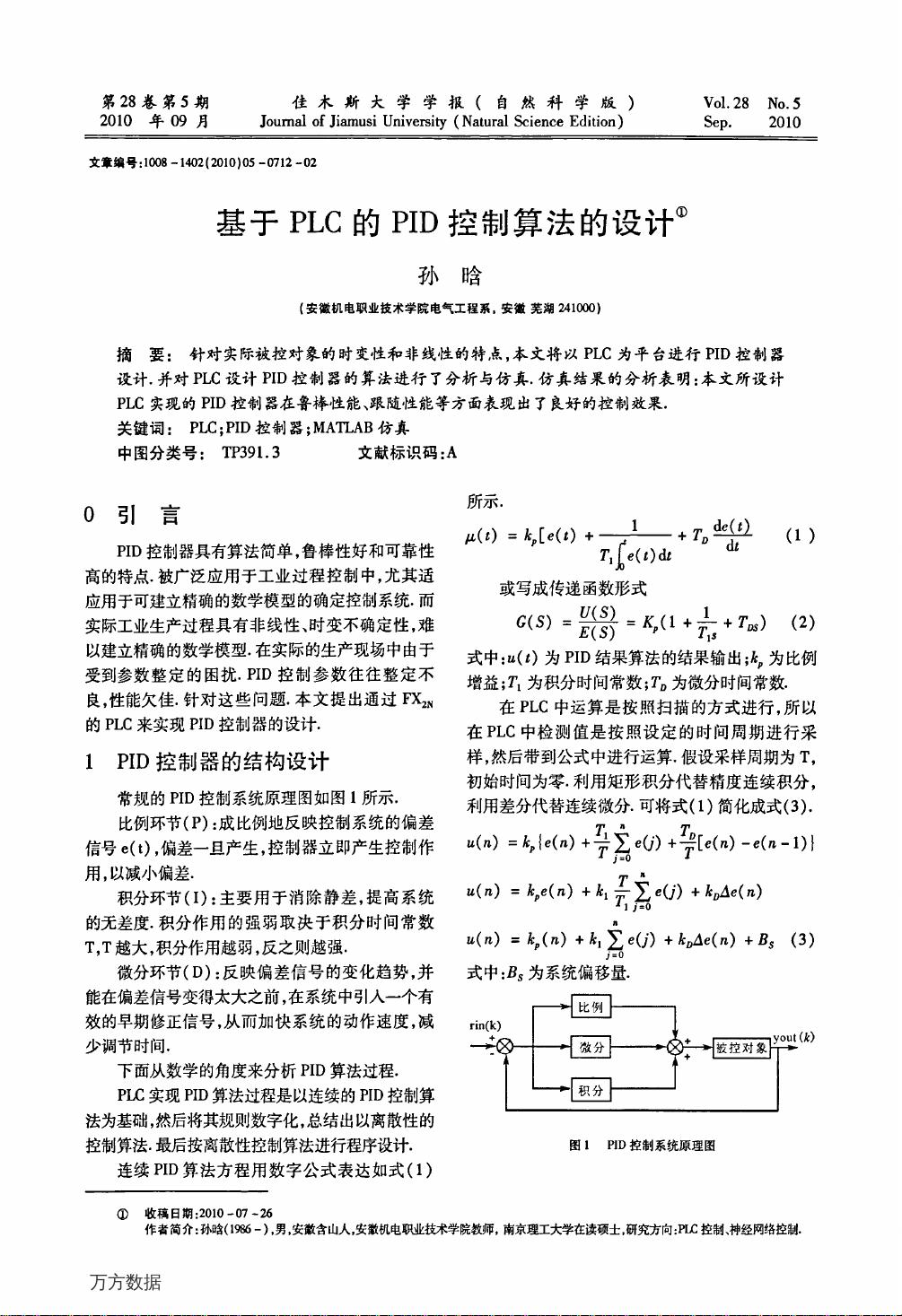
PID控制器由三个基本环节组成:比例(P)、积分(I)和微分(D)。比例环节直接反映了系统的偏差,立即产生控制响应。积分环节用于消除静差,确保系统稳定在设定点。微分环节则预测偏差变化,提前进行调整,提高系统的响应速度。
在实际应用中,由于工业过程的复杂性,PID控制器的参数整定是一个挑战。不恰当的参数可能导致控制效果不佳。因此,文章提出了通过FX系列PLC来实现PID控制器的设计,以解决这个问题。
PLC实现PID算法的过程分为三步:首先,基于连续的PID控制算法,其次将连续算法转换为离散算法,考虑到PLC的数字处理特性,最后根据离散控制算法编写PLC程序。连续PID算法的数学表示为:
\[ u(t) = K_P e(t) + K_I \int_0^t e(\tau) d\tau + K_D \frac{de(t)}{dt} \]
其中,\( u(t) \)是控制器输出,\( K_P \)是比例增益,\( K_I \)是积分增益,\( K_D \)是微分增益,\( e(t) \)是误差信号。
将连续算法离散化后,可以应用于PLC的内部定时器和计数器,形成适合PLC执行的控制策略。通过MATLAB仿真,可以验证和优化PLC实现的PID控制器性能,包括其鲁棒性、跟随性能等关键指标。
在文章中,作者通过仿真结果分析展示了PLC实现的PID控制器能有效应对非线性、时变不确定性的工业过程,表现出良好的控制效果。这种方法简化了参数整定的复杂性,提高了控制系统的整体性能。
关键词:PLC;PID控制器;MATLAB仿真
该文提供了关于如何利用PLC设计和实现PID控制器的详细方法,对于解决实际工业控制中的问题具有指导意义。通过结合PLC的计算能力和PID控制理论,可以实现更高效、稳定的自动化控制方案。
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载
2061 浏览量
581 浏览量
304 浏览量
249 浏览量
2021-08-08 上传
2021-08-07 上传
2022-03-24 上传

wang_xusheng
- 粉丝: 1
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ufrayd
- cstore_fdw:由Citus Data开发的用于使用Postgres进行分析的列式存储。 在https:groups.google.comforum#!forumcstore-users上查看邮件列表,或在https:slack.citusdata.com加入我们的Slack频道。
- 正则化算法
- monaco-powershell:VSCode的Monaco编辑器+ PowerShell编辑器服务!
- ASP网上购书管理系统(源代码+论文).zip
- node-provider-service
- Gradle插件可将APK发布到Google Play-Android开发
- Uecker
- 阿里云机器学习PAI-DSW入门指南.zip
- Cardboard-Viewer:主要使用Three.js,我为Google Cardboard耳机创建了一个陀螺移动VR查看器,以查看我在克利夫兰地区使用Panono 360相机拍摄的360°全景照片和风景。 刷新页面从总共6张照片中选择一张随机照片。 要查看该应用程序,请单击链接:
- Jwg3full.github.io
- 简单的C++串口示例
- 高斯白噪声matlab代码-SPA_for_LDPC:此存储库是关于LDPC(又名低密度奇偶校验)代码的和积算法在二进制对称信道,二进制擦除信
- C/C++:二叉排序树.rar(含完整注释)
- U27fog
- godotenv:Ruby的dotenv库的Go端口(从`.env`加载环境变量。)
