CAN总线汽车仪表设计:步进电机驱动与精确控制
151 浏览量
更新于2024-08-31
收藏 260KB PDF 举报
"基于CAN总线汽车组合仪表的设计与研究,主要涉及步进电机的驱动、存储电路设计以及外围电路的应用。步进电机作为数字控制系统的关键执行元件,将电脉冲信号转化为角位移,实现精确的控制。文章中提到的VID29系列二相汽车仪表步进电机,具备高精度、低噪音和长寿命的特点,适用于汽车仪表盘和其他仪器设备。该电机可工作在3.5V至10V的脉冲电压下,步距角最小可达1/120,最大角速度6000/s,并可通过分步驱动或微步驱动模式进行控制。电机的转动方向由施加在线圈上的脉冲序列相位差决定,脉冲频率与转速成正比,步距角与脉冲频率的关系由特定公式给出。"
在汽车组合仪表的设计中,步进电机起着至关重要的作用,它能够根据接收到的电脉冲信号精确地转动指针,显示车速、转速等关键信息。CAN(Controller Area Network)总线技术的运用,则提升了通信效率和数据传输的可靠性,确保仪表信息的准确显示。CAN总线允许多个设备通过共享通信介质进行通信,减少了布线复杂性,增强了系统的稳定性。
步进电机驱动电路设计通常包括电源部分、驱动器和控制器。电源部分提供电机运行所需的电压和电流,驱动器接收控制器的脉冲信号,将其放大以驱动电机运转。控制器则负责生成适当的脉冲序列,控制电机的步进和速度。在VID29系列电机中,分步驱动模式下,每个脉冲对应600的角度变化,而微步驱动模式通过细分脉冲,使步进更精细,提高了显示的精度。
存储电路设计可能涉及到EEPROM(Electrically Erasable Programmable Read-Only Memory)等非易失性存储器件,用于保存仪表设置和车辆状态信息。外围电路可能包括保护电路,防止电机过载或短路,以及滤波电路,确保信号的纯净稳定。
基于CAN总线的汽车组合仪表设计需要综合考虑步进电机的特性、驱动方式、控制策略以及电路设计等多个方面,以实现高效、精准的显示功能。通过对VID29系列步进电机的选用和优化,可以提高仪表的性能和用户体验,同时降低系统的维护成本。
基于基于CAN总线汽车组合仪表的设计与研究总线汽车组合仪表的设计与研究-步进电机驱动、存储步进电机驱动、存储
电路设计及外围电路电路设计及外围电路
步进电机(Stepmotor)是将电脉冲信号转变为角位移e(或线位移S)的开环控制元件,是数字控制系统的一种执行
元件。工作原理是建立在被励磁的定子电磁铁吸引可选转的衔铁产生转矩而旋转,即靠磁铁引力作用把电磁能
转换成机械角位移。
和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。脉冲的个数决定了转角的大小,而脉
冲的频率决定了电机的转速。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置
等控制领域用步进电机来控制变的非常的简单。一般步进电机可分为二相、三相、四相和六相。
本系统步进电机选用深圳伟力驱动有限公司的VID29系列二相汽车仪表步进电机。 vID29-XX/VID29~xXp仪表步进电机是一
种精密的步进电机,内置减速比180/1的齿轮系,主要应用于车辆的仪表指示盘,也可以用于其他仪器仪表装置中,将数字信
号直接准确地转为模拟的显示输出。VID29步进电机需要两路逻辑脉冲信号驱动,其特点如下:
可以工作于3.5V一10V的脉冲下;
输出轴的步距角最小可以达到1/12
0
,最大角速度600
0
/s,输出转角转动范围为315
0
。可用分步模式或微步模式驱动。
选用进口优质特种材料和汽车级特殊工程塑料,同时兼顾防火等安全性能;
采用具有最低噪声和超低摩擦效果的特殊齿形,保证了马达的长期运转寿命和性能。
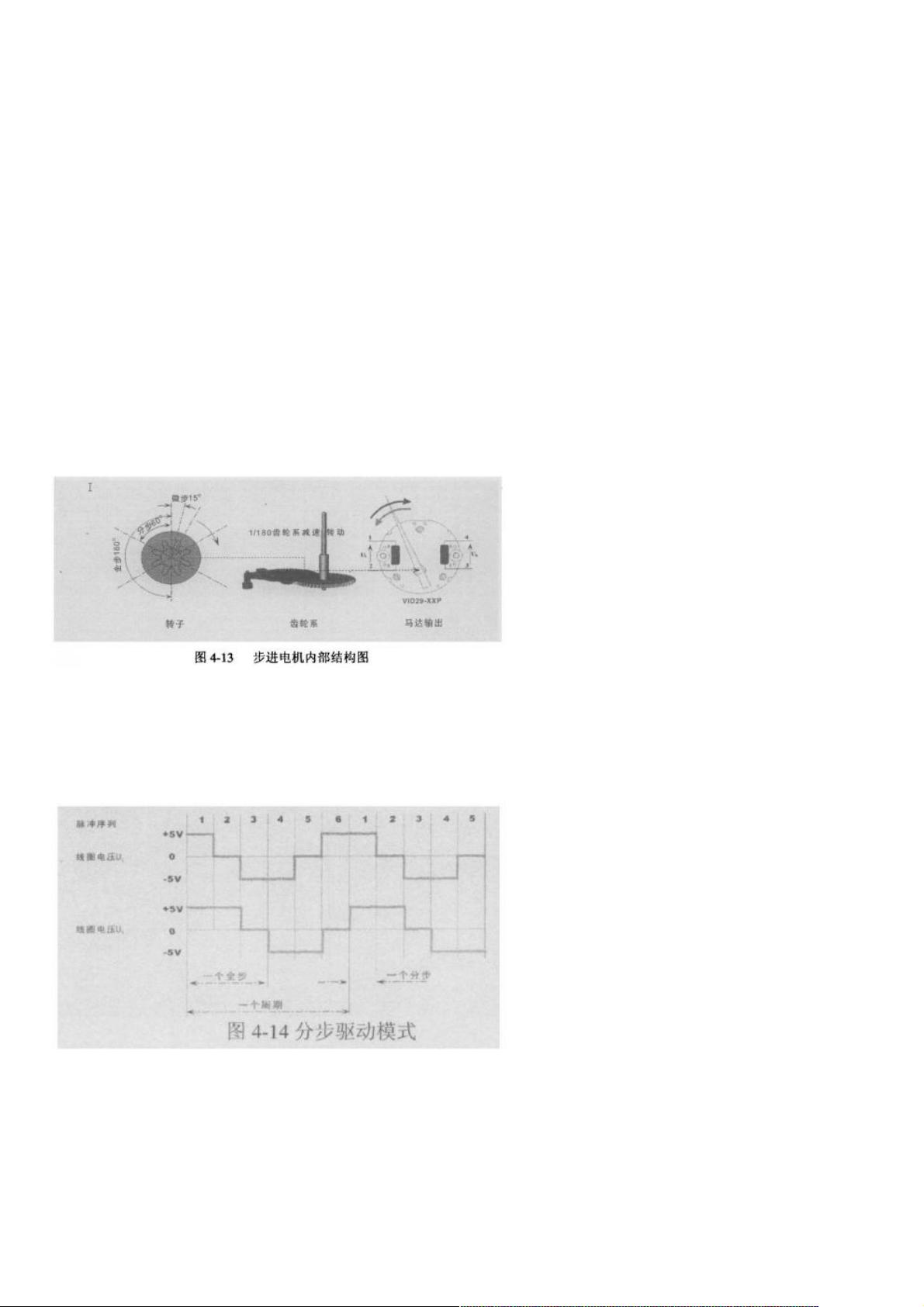
步进电机的分步驱动控制模式:VID29步进电机是经三级齿轮减速转动输出的,驱动要求是用标准的SV逻辑电路电压,可以
以分步驱动模式直接驱动马达,电流需求为20mA。在分步模式下,每个脉冲可以驱动马达转子转动600(即输出轴转动1/3
度)。电机转动的方向取决于施加在电机左右线圈上的周期性脉冲序列的相位差。如下图所示,左线圈电压UL相位超前于右线
圈电压UR时(相位差为/3),VID29一XX系列的电机输出轴将顺时针旋转,VID29一XXP系列的电机输出轴将逆时针旋转。
分步驱动模式脉冲序列如图4一14所示:
微步驱动模式(细分驱动)脉冲序列如图4-15所示:
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-08-01 上传
2020-10-18 上传
2010-08-23 上传
2020-08-29 上传
2021-10-16 上传

weixin_38625708
- 粉丝: 4
- 资源: 944
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
