自制Arduino WiFi监控机器人:低成本版ROVIO
需积分: 50 29 浏览量
更新于2024-07-27
收藏 6.66MB DOC 举报
"这篇资源介绍了如何使用Arduino开源平台构建一个WIFI视频监控小车,参照了市面上的WowWee公司的ROVIO机器人,但提供了一种更为经济的解决方案。作者列出了所需材料和大致成本,并详细描述了组装过程。"
在Arduino开源硬件平台上构建WIFI视频监控小车是一种极具创新和趣味性的实践。Arduino因其易用性和丰富的社区支持而深受DIY爱好者喜爱。这种小车的核心在于它的灵活性和可编程性,允许用户根据自己的需求定制功能。
小车的基础是A4WD铝合金四轮驱动模型,它配备有独立电机驱动的四个轮子,提供了良好的动力和稳定性。组装过程中,需要按照制造商提供的说明书将各个部件正确连接和固定,包括电池组,以确保小车的运行。
ROMEO控制板是基于Arduino的扩展板,它扩展了Arduino的功能,提供了更多的输入输出接口和更强的处理能力。由于Arduino的广泛使用,有许多现成的代码示例和库可以利用,使得编程变得更加简单,即使对于初学者来说也相对友好。通过修改或利用这些示例代码,可以实现对小车的精确控制和各种复杂功能。
监控系统由301摄像头和两自由度DF15MG云台组成。摄像头能够提供实时视频流,而云台则允许上下左右180度的旋转,从而实现全方位的监控视角。为了适应小车的移动环境,摄像头的USB线需要适当剪短以减少束缚。
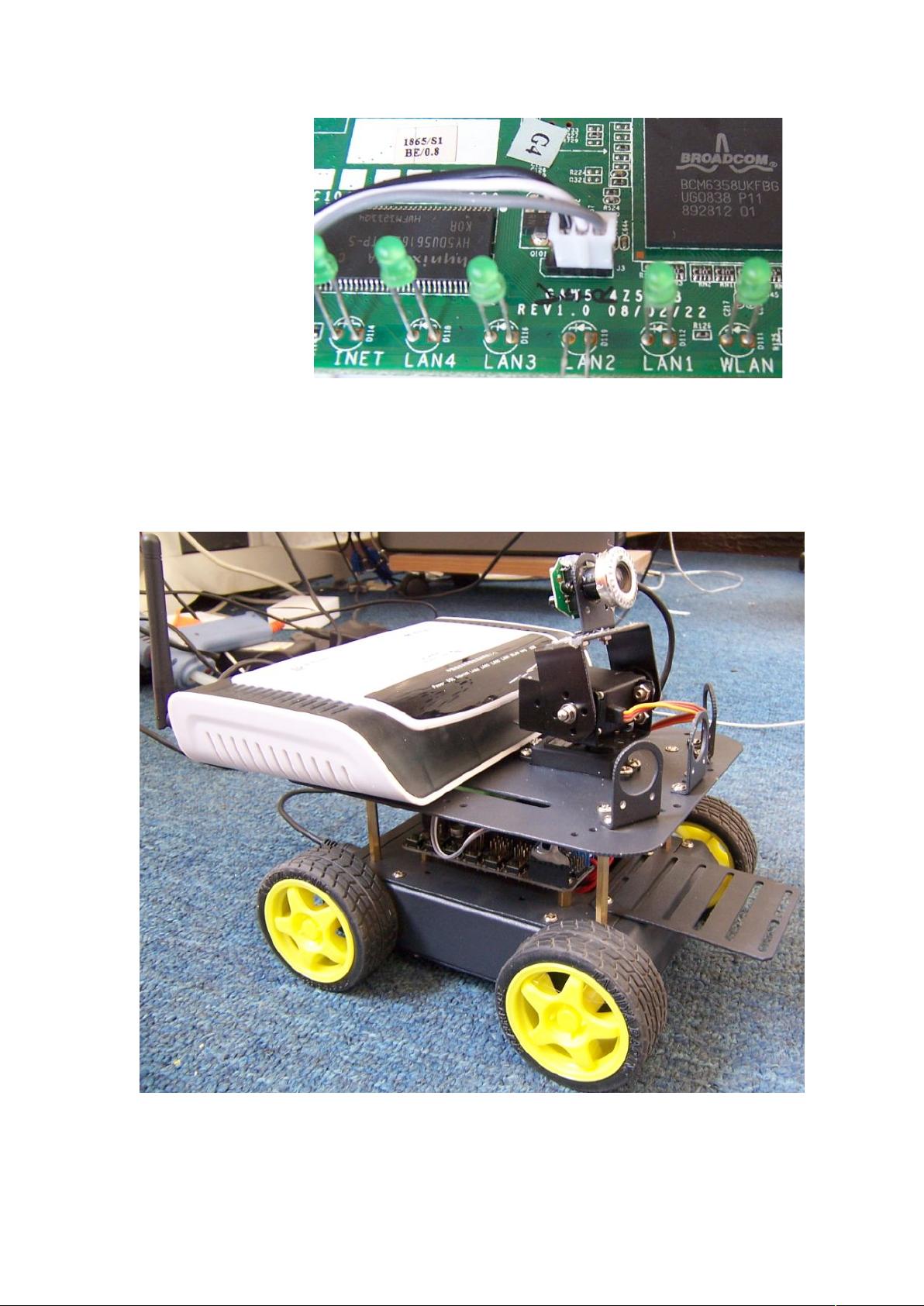
无线路由器是实现WIFI控制的关键。选择支持OpenWrt的路由器,如上海贝尔RG-100A,是因为OpenWrt是一个高度可定制的固件,允许用户添加新的功能和服务,如远程控制和视频流传输。通过OpenWrt,可以将路由器配置为小车的无线通信中心,使得用户能够通过互联网或本地网络远程操作小车并接收视频数据。
整个项目的大致成本约为1124元,这相比市售的专业机器人摄像机如ROVIO,具有更高的性价比,同时提供了一个学习和实验的平台,让爱好者能够深入了解和掌握物联网、无线通信和机器人技术。
通过这样的DIY项目,不仅可以提升电子工程和编程技能,还能体验到创造的乐趣,同时为未来可能的智能硬件项目打下基础。无论是对业余爱好者还是专业工程师,Arduino WIFI视频监控小车都是一个极具吸引力的实践项目。
内存:16M
6. 将 TTL 电 平 的 串
口引出,线序为
1》V 3.3V 电源输出
2》G 地
3》T 数据发送输出
4》R 数据接收输入
在 这 里 只 需 要 将 G,
T ,R 三条线引出来。
我 使 用 了 一 个 USB
转 TTL 的设备做测试,先看看路由器是否能够正常发送数据。
将线从机壳后面引出后就可以将外壳固定在小车上面了。
下面是安装好的图。
剩余14页未读,继续阅读
1106 浏览量
6515 浏览量
2022-06-21 上传
2021-09-20 上传
201 浏览量
108 浏览量
306 浏览量
129 浏览量

baierwahan
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
