行星齿轮箱振动信号增强:组合自适应滤波与故障诊断
需积分: 9 80 浏览量
更新于2024-08-12
收藏 1.68MB PDF 举报
本文探讨了"基于组合自适应滤波方法的行星齿轮箱故障特征增强"这一关键主题,发表在2015年的《机械工程进展》期刊上,卷7,第12期。作者是Shuangshu Tian和Zheng Qian。行星齿轮箱作为风力涡轮机齿轮箱的重要组成部分,其振动信号的可靠性对故障诊断的准确性至关重要。然而,复杂的运行环境导致大量干扰信号混杂其中,同时多齿轮之间的相互啮合以及传动路线的差异使得振动信号呈现出强烈的非线性,这给噪声消除带来了挑战。
本文的主要贡献是提出了一种结合自适应滤波策略。具体来说,该方法采用了延迟信号作为参考信号,并利用自适应噪声取消技术(Self-Adaptive Noise Cancellation, SANC)来有效抑制白噪声。通过这种方法,可以有效地减少背景噪声对故障特征提取的影响,提高信号质量。
此外,作者采用高维度特征空间的处理策略,即通过Gaussian函数对输入信号进行变换,将原始信号转化为更易于分析的高维信号。接着,他们引入了核最小二乘算法(Kernel Least Mean Square, KLMSE),这是一种基于核技巧的机器学习方法,能够处理非线性和高维度数据,有助于识别和提取出隐藏在复杂振动信号中的故障特征。
这种组合自适应滤波方法不仅考虑了信号的实时性和噪声抑制,还结合了非线性特征提取技术,使得行星齿轮箱的故障诊断更加准确和高效。这对于提高风力发电系统的可靠性和维护效率具有重要意义,同时也为其他领域的振动信号处理提供了有价值的参考案例。这篇研究论文深入探讨了在实际工业环境中应用先进的信号处理技术来提升故障检测能力的方法。
where e is a small positive number introduced to pre-
vent division-by-zero exception.
As the characteristic signals are periodical and the
white noise has no periodicity, NLMS algorithm is used
to separate the white noise and periodical signals. But
the difficult point is to find reference signals d(n), as the
signals measured on the gearbox surface contains some
signals of the same components of the noise and charac-
teristic signals but with different amplitude values. So,
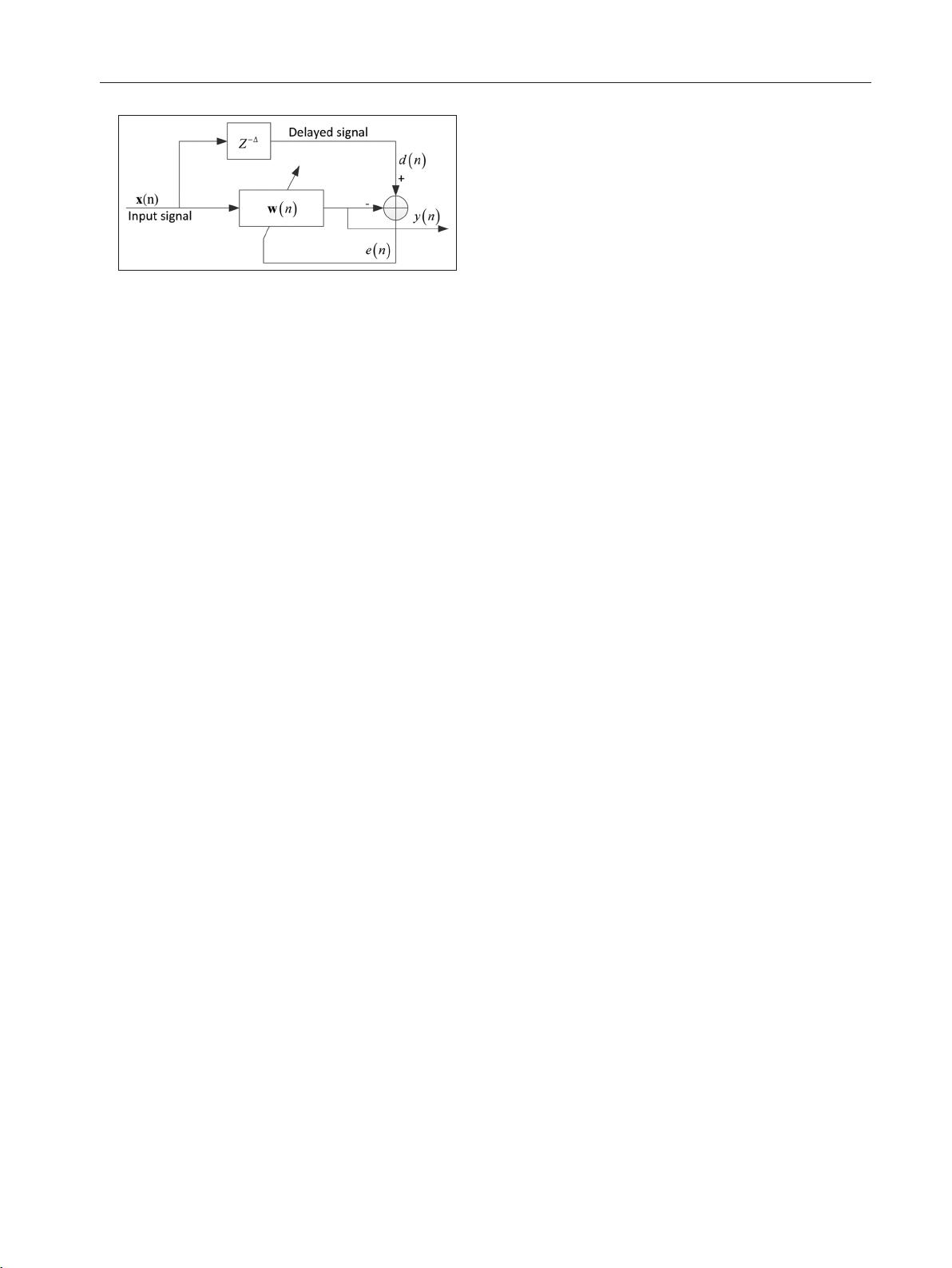
this article uses the Self-Adaptive Noise Cancellation
(SANC) method
13
to separate the periodical signal and
white noise. The SANC method which is using a finite
number delay signal as the reference signal, and combi-
nation with the NLMS, it is effective to deal with the
signals. The signal processing procedure is expressed in
Figure 2.
KLMS adaptive filter
By taking advantage of the reproducing property of
reproducing kernel Hilbert space (RKHS), the KLMS
adaptive filter can implement a nonlinear transforma-
tion to transform the input signal u(n) into high-
dimensional feature-space signal as u(u(n)), and then,
the filtering and adaptation operations can be
performed in RKHS.
14
For the difference in dimen-
sionality of u and u(u), v
T
u(u) is a much more power-
ful model than w
T
u. So, finding v through stochastic
gradient descent may prove as an effective way of non-
linear filtering.
15
The calculation process can be
expressed as follows
v 0ðÞ= 0 ð6Þ
enðÞ= dnðÞf
n1
u nðÞðÞ ð7Þ
v n
ðÞ
= v n 1
ðÞ
+ hen
ðÞ
u u n
ðÞðÞ
= h
X
n
j = 1
ej
ðÞ
u u j
ðÞðÞ
ð8Þ
The output of the system to a new input u
0
(n) can be
expressed as
f
n1
u nðÞðÞ= h
X
n1
j = 1
ejðÞu u jðÞðÞ
"#
u u
0
nðÞðÞ
= h
X
n1
j = 1
ejðÞu u jðÞðÞu u
0
nðÞðÞ½
= h
X
n1
j = 1
ejðÞk u jðÞ, u
0
nðÞðÞ
ð9Þ
enðÞ= dnðÞh
X
n1
j = 1
ejðÞk u jðÞ, u
0
nðÞðÞð10Þ
After N step training, the final input–output is
v nðÞ= h
X
N
j = 1
ejðÞu u jðÞðÞ ð11Þ
ynðÞ= h
X
N
j = 1
ejðÞk u jðÞ, u NðÞðÞð12Þ
where k(u(j)) is the kernel function. The commonly used
kernels include the Gaussian kernel and the polynomial
kernel among many others. In this article, we use the
Gaussian kernel to establish the nonlinear mapping of
the input signal. The Gaussian kernel is defined as
k u, u
0
ðÞ= exp a u u
0
kk
2
ð13Þ
The proposed scheme and numerical
validation
This section describes how SANC and KLMS algo-
rithms were applied to a signal simulated from gearbox
frequencies.
The gearbox applied to the DFIG wind turbine has
two main kind structures, one consists of a planetary
gear and two fixed-axis gears and the other consists of
two planetary gears and one fixed-axis gear. Faults on
the fixed-axis gears are easy to diagnose; this article
mainly focuses on the vibration signals of planetary
gear fault. The structure of a planetary gearbox is
shown in Figure 3; it is composed of planetary gear,
ring gear, sun gear and carrier. When rotating, the ring
gear is fixed, and the carrier rotates with its planetary
gear. In Figure 3, the vibration accelerometer transdu-
cer, mounted on the surface of planetary gear, experi-
ences a periodic variation in vibration amplitudes as
the meshing position periodic changes, and then, the
measured vibration signals have strong nonlinearity.
5
Besides, the different transmission paths would lead the
vibration signals of different measurement points to
nonlinear relationship.
Figure 2. Signal processing procedure of SANC.
Tian and Qian 3
剩余11页未读,继续阅读
195 浏览量
点击了解资源详情
330 浏览量
2025-02-26 上传
278 浏览量
609 浏览量
2022-07-13 上传
330 浏览量
104 浏览量

weixin_38693173
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 久度免费文件代存系统 v1.0:全技术领域源码分享
- 深入解析caseyjpaul.github.io的HTML结构
- HTML5视频播放器的实现与应用
- SSD7练习9完整答案解析
- 迅捷PDF完美转PPT技术:深度识别PDF内容
- 批量截取子网页工具:Python源码分享与使用指南
- Kotlin4You: 探索设计模式与架构概念
- 古典风格茶园茶叶酿制企业网站模板
- 多功能轻量级jquery tab选项卡插件使用教程
- 实现快速增量更新的jar包解决方案
- RabbitMQ消息队列安装及应用实战教程
- 简化操作:一键脚本调用截图工具使用指南
- XSJ流量积算仪控制与数显功能介绍
- Android平台下的AES加密与解密技术应用研究
- Место-响应式单页网站的项目实践
- Android完整聊天客户端演示与实践
