工业机器人浇铸控制系统:设计与效率提升
15 浏览量
更新于2024-08-30
1
收藏 361KB PDF 举报
"本文主要探讨了工业机器人在浇铸控制领域的设计与应用,设计了一种具有高通用性和开放性的工业机器人浇铸控制系统。系统通过分析三轴浇铸机器人的运动学正逆解算法,利用PLC中的M指令进行I/O信号交互控制,实现了高效稳定的浇铸生产。该系统在实际应用中表现出优越的性能,提高了生产效率。文章还讨论了浇铸机器人的特点,如高可靠性、安全性、速度、精度、运动范围、信号交互和耐久性,并详细介绍了系统的硬件和软件结构。硬件结构包括系统控制单元、人机接口和伺服驱动系统,其中工业PC作为核心控制器,伺服驱动系统由多个独立的伺服单元组成。"
工业机器人在浇铸控制中的应用日益广泛,它们在恶劣环境中展现出极高的可靠性和稳定性,保证了生产过程的安全。为了满足这些需求,设计的控制系统需要具备良好的通用性和开放性,以便适应不同的应用场景和设备兼容。在本案例中,三轴浇铸机器人被选为研究对象,其运动学正逆解算法是控制的关键,它决定了机器人的精确运动路径。
运动学正逆解算法解决了机器人关节角度与末端执行器在空间位置之间的转换问题。正解算法用于计算给定位置、姿态时所需的关节角度,而逆解算法则用于确定达到特定位置所需的末端执行器坐标。这一算法的实现确保了机器人在浇铸过程中能够准确地按照预定轨迹移动。
PLC(可编程逻辑控制器)在控制系统中扮演了重要角色,通过定义M指令,可以灵活控制I/O信号,实现对整个浇铸过程的精确控制。这种控制方式简化了系统复杂性,提高了生产效率,同时确保了系统的稳定运行。
硬件系统由系统控制单元、人机接口和伺服驱动系统构成。系统控制单元是心脏,包含CPU、主板和多功能板,通常采用工业PC以保证强大的处理能力和通用性。伺服驱动系统是执行机构,由多个伺服单元组成,每个单元包含伺服驱动器和伺服电机,负责机器人的精确运动。
总结来说,工业机器人浇铸控制系统的成功设计和应用,结合了运动学算法和PLC控制技术,不仅提升了浇铸的生产效率,还确保了系统的稳定性和安全性。这种创新的解决方案对于推动工业自动化和智能制造的发展具有重要意义。
工业机器人浇铸控制系统的设计与应用工业机器人浇铸控制系统的设计与应用
根据浇铸机器人的功能需求和特点,设计了具有良好通用性和开放性的工业机器人浇铸控制系统的软硬件结
构。以三轴浇铸机器人为应用实例,分析了其运动学正逆解算法,并根据实际生产需求,通过PLC程序中定义
的M指令实现整个浇铸系统的I/O信号交互控制。实际应用结果表明,该浇铸控制系统有效地提高了浇铸生产效
率,并且运行稳定可靠。
摘摘 要:要: 根据浇铸机器人的功能需求和特点,设计了具有良好通用性和开放性的工业机器人
关键词:关键词: 工业机器人;浇铸控制系统;运动学; PLC;交互控制
随着工业机器人相关技术的不断发展和成熟,工业机器人应用范围不断扩展,产品涵盖金属焊接、喷涂、浇铸、装配、搬
运、包装、激光加工等方面,应用领域包括汽车、摩托车、工程机械、家电等行业[1,2]。不同用途的工业机器人在工作环境、
机器人的自由度、与外部系统的信号交互控制等方面存在较大的差异。作为工业机器人的主要应用之一,浇铸机器人具有以下
显著特点:(1)可靠性强、稳定性高、正常运行时间长;(2)安全性高,浇铸中金属液体温度极高,要充分保障人员、机器人和
其他财产安全;(3)速度快,浇铸工艺决定了操作周期时间短;(4)精度高,保证零件生产质量稳定;(5)运动范围广,为提高工
作效率,一般一台机器人同时为多台浇铸机浇铸,要求机器人具有较大的运动范围;(6)信号多且交互频繁;(7)坚固耐用,能
适应普通浇铸车间恶劣的生产环境;(8)通用性和柔性化,适合不同的应用场合。鉴于浇铸机器人的上述特点,本文将结合其
应用实例,介绍相关的设计方案和一些具体问题的解决措施。
1 机器人浇铸控制系统的结构机器人浇铸控制系统的结构
机器人浇铸控制系统分为硬件结构和软件结构两大部分。
1.1 系统硬件结构系统硬件结构
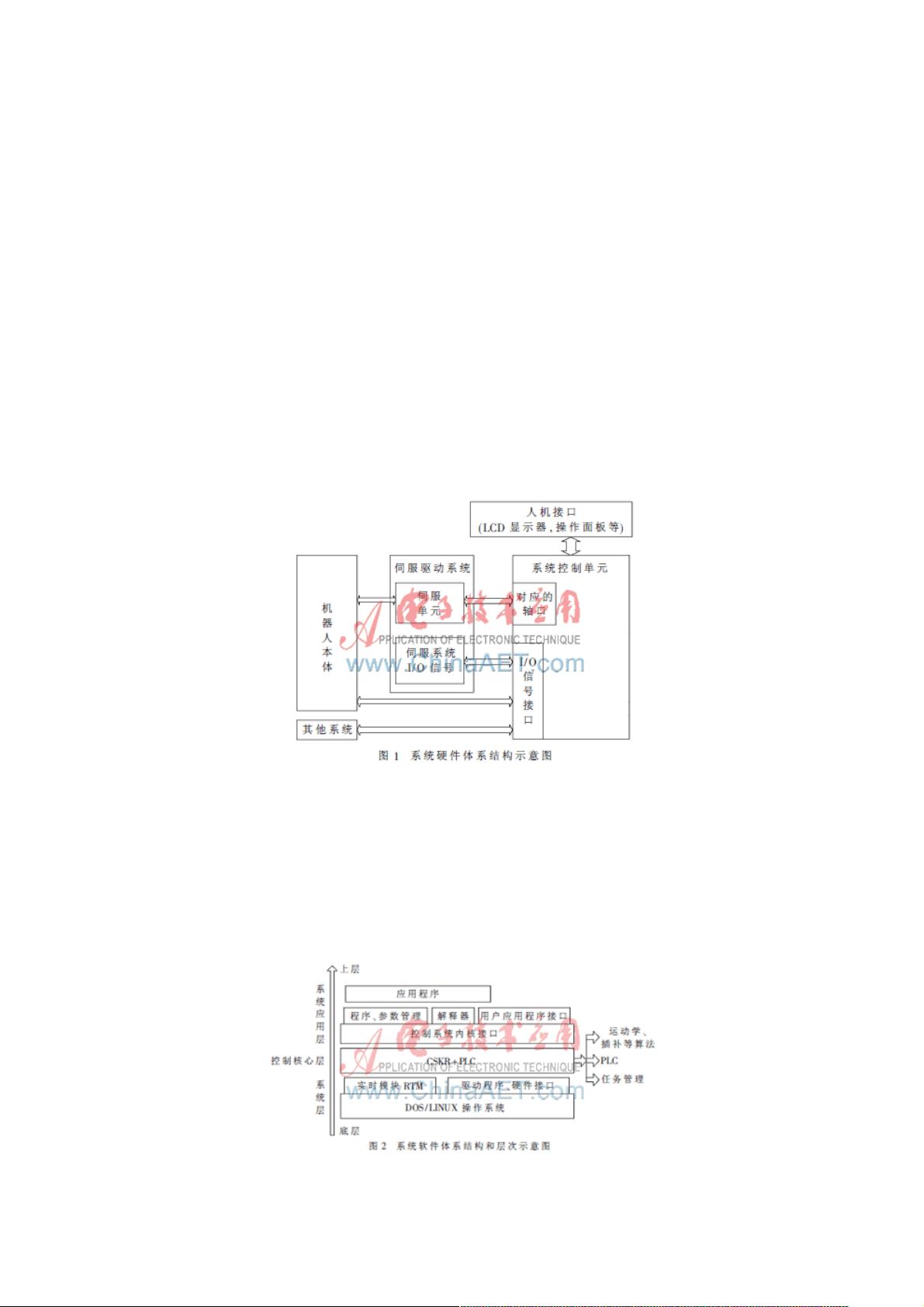
本文所设计的机器人浇铸控制系统的硬件系统包括系统控制单元、人机接口、伺服驱动系统等主要部分[3],其结构示意图
如图1所示。
系统控制单元是整个浇铸控制系统硬件结构的核心,主要组成部分包括CPU、主板和多功能板等。CPU和主板等硬件模块
都集成在工业PC中,而在实际应用中,鉴于工业PC强大的处理能力及其良好的通用性,越来越多的机器人采用工业PC作为
控制系统的核心控制器[2],本文采用的是嵌入式
伺服驱动系统由最多可达8个的独立的伺服单元组成,每个伺服单元由一个带标准脉冲指令接口的伺服驱动器及一个伺服电
机组成,并对应机器人一个关节轴。一般来说,工业机器人最多有6个关节轴,即使在某些应用场合下,还需要1或2个自由度
的导轨、变位机等设备,系统仍然可以满足实际应用的需求。
1.2 系统软件结构系统软件结构
为提高系统的开放式和通用性,软件系统分为三层:系统层、控制核心层和主要由人机交互模块HMI(Human Machine
Interface)组成的系统应用层,其结构示意图如图2所示。
软件结构的系统层主要包括操作系统和驱动程序、硬件接口等。为了实现控制系统的实时控制,需要在DOS系统或者Linux
系统平台上开发出相应的实时模块RTM(Real Time Module)。
控制核心层是整个软件系统和整个控制系统的核心,主要包括机器人控制系统核心CSKR(Control System Kernel of Robot)
和PLC是其主体部分。系统内部CSKR和PLC采用共享存储的方式来进行信息交换,按照事先约定划分功能区,并定义访问规
则[3]。控制核心层通过底层接口实现信息交换和功能调用,以软中断的方式处理实时任务、运动控制、插补运算和报警;以
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-14 上传
2021-08-13 上传
2019-03-08 上传
2021-09-20 上传
2019-10-23 上传
2021-09-17 上传
2021-09-07 上传
2023-07-12 上传
2022-04-12 上传

weixin_38520275
- 粉丝: 7
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
