TC3运动控制入门:设备扫描与基本设置教程
本指南深入介绍了TC3(TWINCAT 3)运动控制的基础入门流程,主要针对运动控制功能在这款自动化软件中的应用。首先,用户需要在TC3中进行设备扫描,通过 EtherCAT 协议连接电机。对于旋转变压器反馈的电机,可能需要手动添加电机类型,而编码器反馈的电机可以自动识别。在设备配置过程中,会涉及到NC(数字控制器)轴的添加和激活,以及参数的初步设置。
激活配置完成后,用户需要确保电机的使能状态,这包括设置控制、正转和反转选项。通过F4键,可以实现电机的启动和停止操作,F5和F6分别对应启动和暂停,F8用于清除错误状态。在轴的运动控制方面,本指南重点讲解了三种基本类型的运动:绝对运动、相对运动和来回运动。
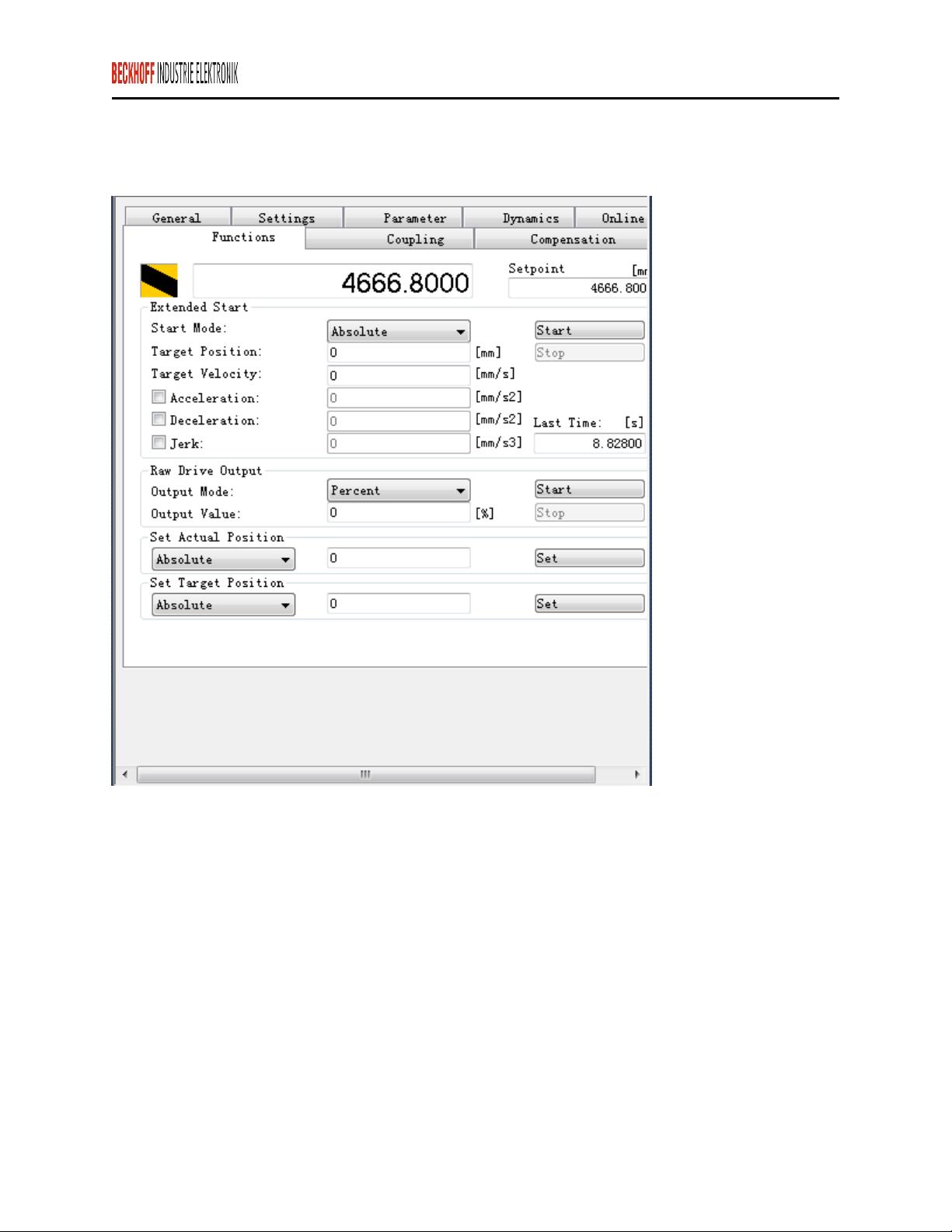
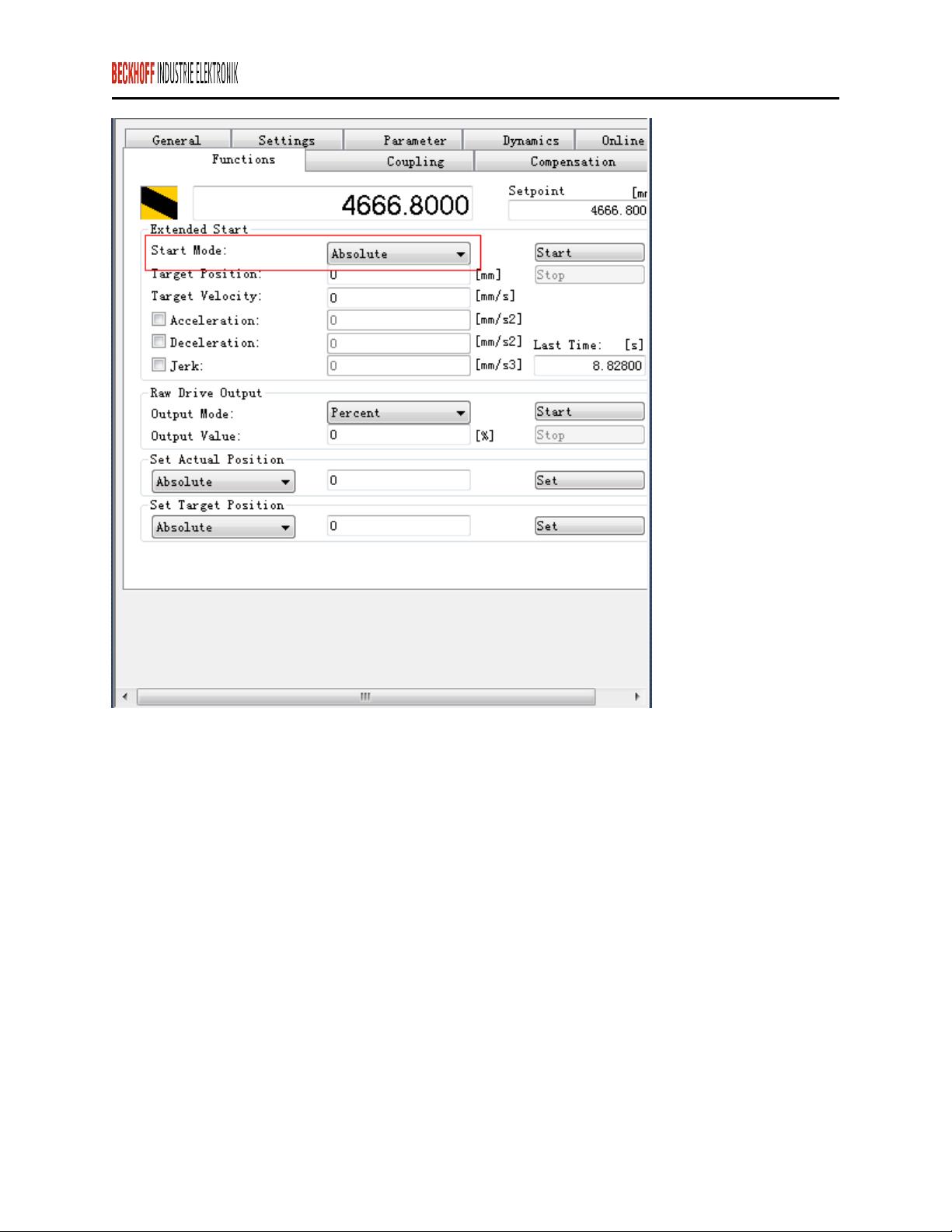
在"Functions"标签页中,用户可以配置绝对运动,通过更改startmode为absolute,设定目标位置(targetposition)和目标速度(targetvelocity),然后点击start命令,轴就会按照预设的参数进行精确的绝对运动。这表明TC3提供了丰富的运动控制功能,能够满足工业生产中的精确定位和控制需求,是自动化生产线中不可或缺的一部分。
这份指南旨在帮助新用户快速理解和掌握TWINCAT 3的运动控制功能,无论是设备的连接、配置还是实际操作,都详细地给出了步骤和注意事项,有助于提高工作效率和减少故障排查时间。对于从事工业自动化或机器人的工程师来说,这是一份实用且重要的参考资料。
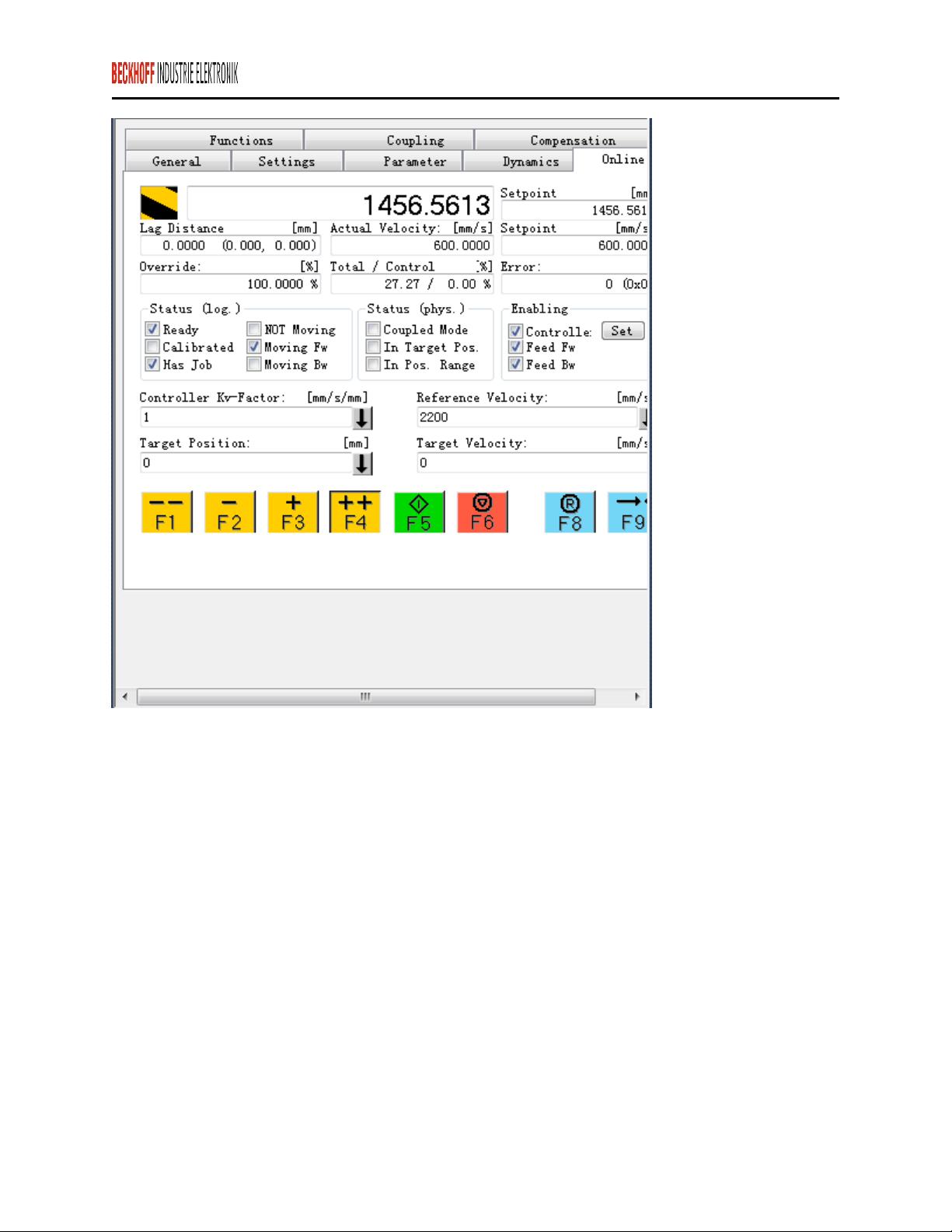
下方这些 F1,F2,F3,F4 分别表示,快退,慢退,慢进,快进。
F5,F6 表示启动和暂停。
F8 为 reset,用来解除报错状态的。
同样的测试对轴 2 也同样适用。
(二) 轴的运动
接下来是轴的运动,轴的运动有很多种,有绝对运动,相对运动,来回运动,
寸动等。
主要介绍绝对,相对和来回。
For questions or comments, email support@beckhoff.com.cn
10
剩余56页未读,继续阅读
254 浏览量
236 浏览量
436 浏览量
1810 浏览量
384 浏览量
点击了解资源详情
301 浏览量

zhugjxxx
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- CStrAinBP:2 个单元格串的重叠元素。 比 INTERSECT/ISMEMBER/SETDIFF 快 10-20 倍。-matlab开发
- SecKill-System:一个秒杀抢购项目:分别提供MySQL乐观锁,Redis分布锁和ZooKeeper分布锁共3种方案
- rt-thread-code-stm32f103-yf-ufun.rar,yf-ufun STM32F103 是优凡
- Gra_w_zgadywanie_liczb_2
- shuaishuai-book
- KaanBOT:KaanBOT是一款适度有趣的不和谐机器人
- ARFlower:AR花
- 建筑公司项目部施工管理制度汇编(流程图、岗位职责)
- 实现reload按钮效果源码下载
- PDFBookmark-1.0.2-final.zip
- 行间拖拽插件
- SFACC:阿西西圣法兰西斯天主教会加拉迪玛瓦网站
- CAD图块素材之电视背景墙、玄观、书柜详图
- API:GitHub上Viva Wallet开源项目的索引
- chokidar-cli:快速的跨平台cli实用程序,可监视文件系统的更改
- book_project
