Arduino Mega2560与DynamixelShield控制MX-64R舵机指南
需积分: 40 159 浏览量
更新于2024-08-04
1
收藏 1.13MB PDF 举报
"Arduino_mega2560+DynamixelShield控制MX-64R舵机流程指导"
本文档是一份详细的指南,用于教导用户如何使用Arduino Mega 2560与Dynamixel Shield结合来控制MX-64R伺服电机。作者Peng.W提供了从安装Arduino IDE到编写代码、配置硬件的全过程步骤。
一、安装Arduino IDE
1. 访问Arduino官方网站下载对应操作系统的IDE安装包。
2. 使用tar命令解压缩下载的文件。
3. 将解压缩后的文件移动到/opt目录,并给予安装脚本执行权限。
4. 运行安装脚本完成Arduino IDE的安装。
二、环境配置和相关库加载
1. 在Arduino IDE中选择Arduino Mega 2560作为开发板。
2. 安装DynamixelShield库。通过IDE的“管理库”功能搜索并安装,同时,由于DynamixelShield库依赖于dynamixel2arduino库,安装过程中会一同安装。
三、硬件搭建
1. 硬件清单包括:Arduino Mega 2560、Dynamixel Shield、Arduino串行下载线、12V电源、USB转TTL刷机线、MX-64R伺服电机、原装伺服线和杜邦线。
2. 硬件图示展示了各个组件的外观。
3. 硬件连接步骤:
- Arduino Mega 2560通过串行下载线与电脑连接,用于上传代码。
- Dynamixel Shield插在Arduino Mega 2560上,提供与MX-64R的接口。
- MX-64R伺服电机通过原装伺服线连接到Dynamixel Shield的相应端口。
- 12V电源为伺服电机供电,通过Dynamixel Shield的电源输入。
- USB转TTL刷机线可用于更新伺服电机的固件,若需要的话。
四、执行例程scan_dynamixel
这部分内容可能包含如何编写和运行扫描Dynamixel网络的代码,以便找到并识别连接的MX-64R伺服电机。这通常是设置过程中的第一步,确保能正确通信并获取伺服电机的相关信息,如ID、位置和速度等。
这份指南为Arduino新手和机器人爱好者提供了一条清晰的路径,帮助他们快速掌握如何使用Arduino Mega 2560和Dynamixel Shield控制高性能的MX-64R伺服电机,从而实现精确的机械臂或机器人运动控制。通过遵循这些步骤,用户可以学习到如何配置开发环境、连接硬件以及编写和运行控制代码的基础知识。
2
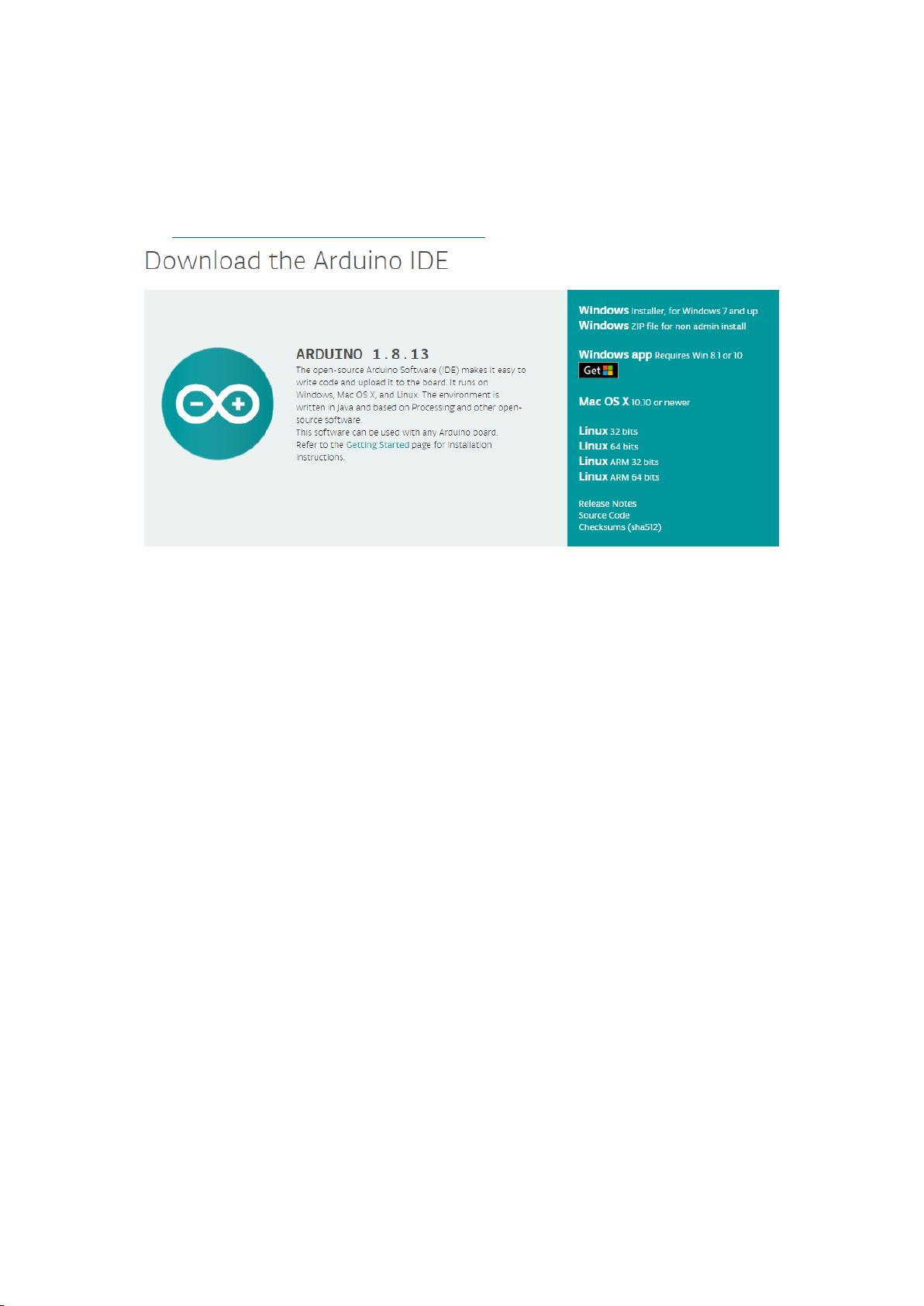
一、安装 Arduino IDE
(1) 下载 Arduino IDE 安装包
官方下载链接:
https://www.arduino.cc/en/Main/Software
选择对应版本即可(该文档使用的是 64 位 linux 系统)
(2) 使用 tar 命令对压缩包解压
tar -xvf arduino-1.x.y-linux64.tar.xz
(3) 将解压后的文件移动到/opt 下
sudo mv arduino-1.x.y /opt
(4) 进入安装目录,对 install.sh 添加可执行权限,并执行安装
cd /opt/arduino-1.x.y
sudo chmod +x install.sh
sudo ./install.sh
剩余11页未读,继续阅读
2021-06-11 上传
2021-10-01 上传
2018-10-11 上传
2018-12-17 上传
2020-01-13 上传
111 浏览量
2021-03-30 上传
2021-10-11 上传

生途南北
- 粉丝: 141
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 开源通讯录备份系统项目,易于复刻与扩展
- 探索NX二次开发:UF_DRF_ask_id_symbol_geometry函数详解
- Vuex使用教程:详细资料包解析与实践
- 汉印A300蓝牙打印机安卓App开发教程与资源
- kkFileView 4.4.0-beta版:Windows下的解压缩文件预览器
- ChatGPT对战Bard:一场AI的深度测评与比较
- 稳定版MySQL连接Java的驱动包MySQL Connector/J 5.1.38发布
- Zabbix监控系统离线安装包下载指南
- JavaScript Promise代码解析与应用
- 基于JAVA和SQL的离散数学题库管理系统开发与应用
- 竞赛项目申报系统:SpringBoot与Vue.js结合毕业设计
- JAVA+SQL打造离散数学题库管理系统:源代码与文档全览
- C#代码实现装箱与转换的详细解析
- 利用ChatGPT深入了解行业的快速方法论
- C语言链表操作实战解析与代码示例
- 大学生选修选课系统设计与实现:源码及数据库架构
