ROS底盘控制与Arduino电控安装调试
需积分: 23 64 浏览量
更新于2024-09-07
2
收藏 52KB DOCX 举报
"ROS底盘控制涉及使用Arduino UNO和DFRobot大功率直流电机驱动板来操控行星减速电机,通过电控安装和初步调试确保底盘的正确运行。在电控安装阶段,需要按照指定的连线图连接硬件,并注意电机连接线的颜色匹配。在初步调试时,首先要检查线路相序,确保电机能按预期方向转动。之后,通过编码器清零和读数调整,保证在前进和后退时编码器读数符合预期。程序基于ros_arduino_bridge,经过修改以适应DFRobot驱动板和20KHz PWM输出。若使用3个全向轮,推荐使用3路编码计数器板卡以提高稳定性。在运行上位机程序前,需要确认已安装ROS (indigo) 并熟悉其基本操作。"
本文档主要讲解了如何利用ROS系统控制一个基于Arduino UNO的机器人底盘。首先介绍了所需的硬件组件,包括Arduino UNO、DFRobot大功率电机驱动板和行星减速电机。在电控安装部分,强调了按照连线图正确连接各个硬件设备,特别是电机连接线的颜色匹配,以确保电机能够正向旋转。
初步调试阶段,首先将底盘架空以避免轮子触地,然后烧录特定的Arduino程序“Base_Control_UNO.ino”。通过串口监视器输入指令“m2020”测试电机转向,如果转向错误则调整电机正负极线序。接着,通过输入“r”清零编码器,并手动转动车轮,根据编码器读数判断电机AB线是否需要交换,以保证前进时编码器读数为正,后退时为负。
程序方面,基于ros_arduino_bridge的arduinoUNO版本进行修改,以适应DFRobot驱动板并提供20KHz的PWM输出。这个修改后的程序包含中文注释,便于理解和使用。此外,如果采用3个全向轮,推荐使用3路编码计数器板卡,以提高编码器计数的稳定性和简化设计。
在进行上位机程序运行之前,需要确保已经安装了ROS indigo版本,并且具备基本的ROS操作知识。这包括创建和使用“catkin_ws”工作空间,以及对ROS系统的初步理解。只有在满足这些前提条件下,才能顺利进行ROS底盘控制的后续步骤。
(一)电控安装
所需硬件:
1 Arduino UNO 以及扩展版
2 DFRobot 大功率直流电机驱动板
3 行星减速电机自带适配器
步骤:
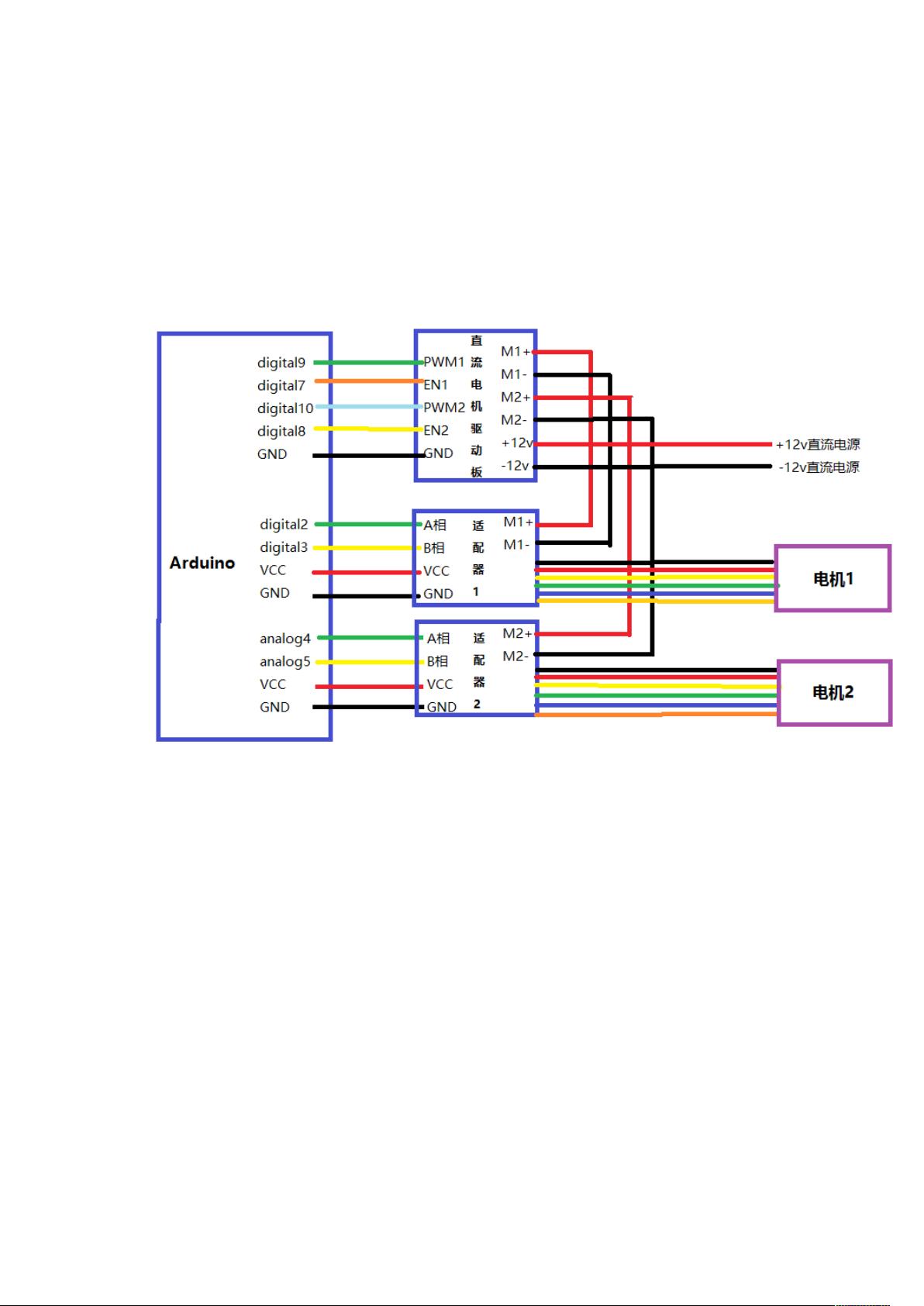
按照以下连线图进行线路连接
注意事项:
电机连接线颜色按照下图所示
(二)初步调试
检查线路相续
1 将小车底盘架空(避免轮子着地),通电,将 “烧录到
Arduino UNO 控制板中。
2 打开串口监视器,输入“然后回车,观察车轮转向。如果两轮同时向前进方向
转动,则进入下一步,否则调整调整电机正负极连线相序,使得两个电机向前进方向转
动。
3 输入“r”,回车,使得编码器读书清零。用手往前进方向转动一下左车轮,输入“r”,回车,
在串口监视器上打印出两个数字,两个数字分别对应两个电机编码器读书,现在转动的
电机编码器读书如果为负数,则交换该电机编码器 A B 相连线。以此类推,最终结果要
使得在编码器清零后,车子前进时两编码器读数为正,后退时两编码器读数为负。
程序说明
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-04 上传
2022-11-03 上传
2023-02-22 上传
2022-06-21 上传
2022-06-22 上传
2024-03-27 上传

zq12345678
- 粉丝: 1
- 资源: 46
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解释树:介绍培训材料带隙预测的决策树模型,然后使用TreeExplainer理解模型预测的简介
- 基于java的开发源码-加密解密工具集 JCT v1.0源码包.zip
- TakeOff:一个可帮助人们支持本地小型企业的Webapp
- template-share:共享幻灯片模板的网站
- CS510IR:一切都围绕着我在UIUC的CS510高级信息检索《 2021年Spring》中的工作经验
- node-red-contrib-meengion:Einfaches Node RED Node zur Ermittlung des Strompreises and Ersparnis mit einem vorhandenen VARTA Engion Speichers
- SMART:智能手机成瘾减少工具
- 基于java的开发源码-搜索自动提示 Autotips.zip
- Linux Lab内核实验室-其他
- kou-portal:寇Portal机器人! 订购
- 行业分类-设备装置-可降解商标贴纸用改性母粒间断性成型造粒系统及工艺.zip
- olicia-rose
- jeffButton 一个做按钮用的开源VB控件
- GestureRecognizer:自定义 UIGestureRecognizer 的演示
- MrCode版本
- 软冗余_315-2DP_CP342-5例子程序.zip西门子PLC编程实例程序源码下载
