PID电机控制详解:理论与仿真实战指南
需积分: 9 151 浏览量
更新于2024-07-19
收藏 6.29MB PDF 举报
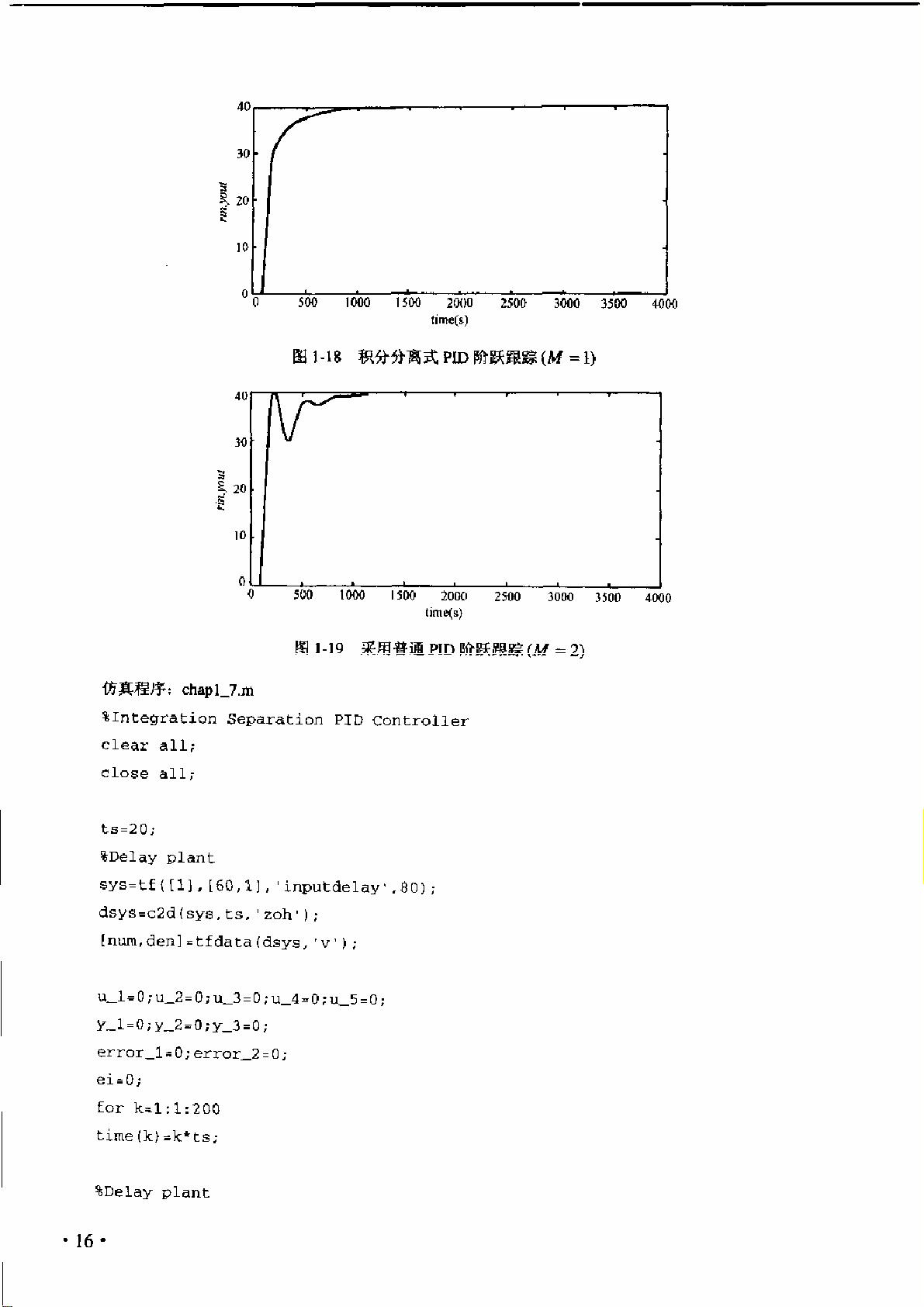
该文档是一份深入讲解PID控制在直流电机领域的专业参考资料,涵盖了多个方面的内容,旨在帮助读者理解并掌握PID控制的各种变体和应用。首先,第1章介绍了数字PID控制的基础,包括PID控制原理、模拟与数字仿真,详细列举了如位置式、离散系统、增量式、积分分离、抗积分饱和、梯形积分等不同类型的PID算法,并配以相应的仿真示例。这些内容不仅阐述了理论,还提供了实际操作的模拟实验,便于理解和实践。
第二部分着重于常见的PID控制系统,包括单回路控制、串级控制以及针对纯滞后系统的控制策略,如大林控制和Smith控制,既有连续控制也有数字控制版本的讨论,每个控制方法都有其独特的原理和仿真分析。
第三章深入到专家PID控制和模糊PID控制领域,专家PID利用专家知识来优化控制,模糊自适应整定PID则结合模糊逻辑和自适应性,使得控制器能根据环境变化进行动态调整。此外,还有模糊免疫PID控制,它将模糊逻辑和免疫系统相结合,提高控制的鲁棒性和准确性。
第四章探讨神经PID控制,通过神经网络技术来增强PID控制的智能化。这部分涉及基于单神经元网络的PID智能控制,包括不同学习规则的应用,如单神经元自适应PID控制和改进版本,以及基于BP神经网络和RBF神经网络的PID整定和辨识方法。这些章节都强调了理论与实际应用的结合,通过仿真程序展示了神经网络如何提升PID控制的性能。
这份资料提供了一个全面的框架,帮助读者理解PID控制在直流电机控制中的各种实现形式,无论你是初学者还是高级工程师,都能从中找到适合的学习路径和实战技巧。通过深入学习和实践,可以提升电机控制系统的精度和稳定性,以满足不同应用场景的需求。
2015-08-19 上传
2015-08-11 上传
2023-07-13 上传
2023-11-19 上传
2023-06-27 上传
2024-03-19 上传
2023-05-09 上传
2023-12-28 上传

zselery
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
