Yolo系列目标检测算法详解:从R-CNN到Faster R-CNN
197 浏览量
更新于2024-08-31
1
收藏 1.58MB PDF 举报
"本文主要探讨了目标检测领域的经典算法,特别是Yolo系列之前的R-CNN家族,包括R-CNN、Fast R-CNN、Faster R-CNN等。文章详细介绍了R-CNN的基本结构和工作原理,以及后续的改进方法,如SPP和ROI,以及Fast R-CNN和Faster R-CNN的优化策略。"
目标检测是计算机视觉领域的重要任务,它包含了目标的定位和分类两个关键步骤。在Yolo系列出现之前,R-CNN系列是主流的方法。R-CNN(Regions with Convolutional Neural Networks)算法由三部分组成:选择性搜索、候选区提取和分类。选择性搜索用于生成可能包含物体的区域,然后通过CNN或SVM对这些区域进行分类。然而,R-CNN的计算效率低,因为它需要对每个候选区独立运行CNN。
为了提高效率,SPP-Net(Spatial Pyramid Pooling Network)和ROI Pooling被引入。SPP-Net允许固定大小的输出,即使输入尺寸变化,而ROI Pooling则针对特征图上的候选区域进行池化,共享特征提取,显著减少了计算量。
Fast R-CNN对R-CNN进行了改进,合并了分类和边界框回归的损失,采用了一步训练,并将SPP换成了ROIPooling,使用Smooth L1损失函数来提高训练稳定性。尽管如此,Fast R-CNN仍然需要预先生成候选区域。
Faster R-CNN进一步解决了这个问题,通过引入Region Proposal Network(RPN),直接在CNN特征图上生成候选区域,实现了目标检测的端到端训练,极大地提高了速度和性能。
R-CNN系列的发展展示了目标检测技术从基于区域的分步方法向更高效、端到端模型的转变,这些进展为后来的YOLO(You Only Look Once)系列算法奠定了基础,YOLO以其实时处理能力和高效率成为了目标检测领域的新里程碑。
目标检测算法之目标检测算法之Yolo系列系列
引入
目标检测算法是计算机视觉三大基础任务之一,其包括目标定位和目标分类两部分。
在 yolo 系列出来之前,主流的做法是分段式的 R-CNN 系列,主要包括 R-CNN、Fast R-CNN、Faster R-CNN、Mask R-
CNN 等。
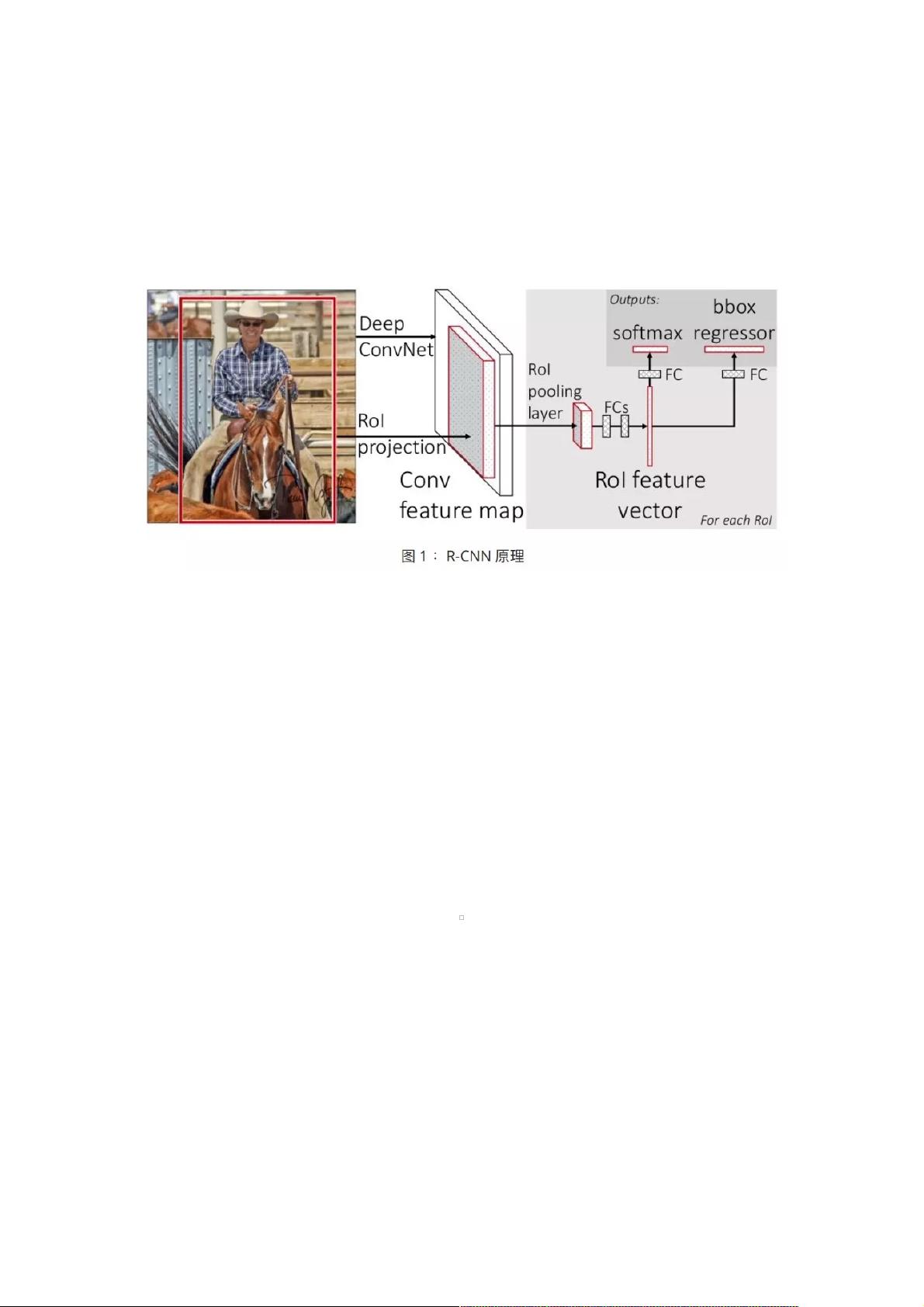
R-CNN 基本结构和原理
R-CNN 的基本结构如下图所示:
R-CNN 主要分为候选区提取和候选区分类两个阶段,并且两阶段分开训练。其主要思想如下。
首先通过选择性搜索(Selective Search)对输入进行超像素合并,产生基础的子区域。然后将小的子区域不断合并成大区
域,并从中找出可能存在物体的区域,这个过程即候选区提取(Region Proposal)。
提取出包含目标的候选区之后,需要对其进行分类,判定目标属于哪一类。可以通过 SVM 或 CNN 等算法进行分类。
R-CNN 的不足与改进
SPP 和 ROI
要实现较为实用的 R-CNN 网络,往往需要对输入样张提取上千个候选区,并对每个候选区进行一次分类运算。于是,后续出
现空间金字塔池化(SPP) 和 region of interest(`ROI)等方式进行改进。
其基本思想是,输入图片中的目标区域,经过 CNN 后,得到的特征图中,往往也存在着对应的目标区域,此即 ROI。后续对
该特征图(多种尺度)上的 ROI 进行分类,此即 SPP。
通过这种方式,可以共用特征提取部分,只对最后的特征图进行候选区提取和分类。这样就可以极大地减少总的计算量,并提
升性能。
Fast R-CNN
但是,SPP 和 ROI 方式,仍旧需要分段训练。其不仅麻烦,同时还分割了 bounding box 回归训练与分类网络的训练。这使
得整个函数的优化过程不一致,从而限制了更高精度的可能。
于是,再次对其进行改进:
1.进行 ROI 特征提取之后,将两种损失进行合并,统一训练。这样相对易于训练,且效率更高
2.将 SPP 换做 ROI Pooling
3.对于 bounding box 部分的 loss,使用 Smooth l1 函数,可以提升稳定性
Faster R-CNN
在 Fast R-CNN 中,对 ROI 而非原图的候选区进行分类,提升速度。因此,下一步可以对候选区提取部分进行优化,提升性
能。
因此,在 Faster R-CNN 中,不再对原图进行候选区提取,而是直接对经过 CNN 后的特征图进行候选区提取,这部分网络,
下载后可阅读完整内容,剩余9页未读,立即下载
2021-01-27 上传
2020-05-15 上传
2023-06-02 上传
2023-05-18 上传
2024-04-29 上传
2023-11-24 上传
2023-07-31 上传
2023-08-05 上传
2023-06-08 上传
2023-06-08 上传

weixin_38656609
- 粉丝: 4
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
