乐高教育套装探索:人工智能与机器人实验指南
版权申诉
33 浏览量
更新于2024-06-27
收藏 10.77MB DOCX 举报
"该文档是关于人工智能与机器人实验设计的教程,主要以Lego9797教育套装为平台,通过一系列实验引导学生认识和掌握机器人基础知识,包括硬件组件、编程和传感器应用。"
在本实验设计中,首先介绍了实验一——认识乐高9797教育套装及其组件。实验目的旨在帮助学生熟悉套装中的主控制器、电机以及各种传感器和积木的功能。实验步骤详细指导了如何拆封套装,识别不同部件,并鼓励学生利用积木进行创意组装。
实验二“我能听见”关注声音感知,学生需要组装带有声音传感器的机器人,并编写相应程序,使机器人对声音做出反应。这个实验旨在教授声音传感器的使用和基础编程技巧。
实验三“探路机器人”要求学生构建一个能自主寻路的机器人,涉及光线传感器的应用,以帮助机器人避开障碍。通过此实验,学生可以学习如何处理环境输入并控制机器人的移动。
实验四“啊,撞墙了,我闪!”进一步提升避障能力,让学生设计一个能检测到墙壁并自动转向的机器人,涉及到碰撞检测和反应编程。
实验五“黑白边缘检测”则引入颜色感知,让学生使用颜色传感器来检测黑白边缘,从而控制机器人的行进方向,深化对传感器应用的理解。
实验六“LabVIEW初探”是一个软件学习实验,介绍National Instruments的图形化编程环境LabVIEW,让学生学会安装、启动和初步操作该软件,为后续的机器人编程打下基础。
最后,实验七“我的速度我做主”结合LabVIEW,让学生编写控制机器人速度的程序,同时提供了额外的挑战,如编写击球程序,增强学生的编程能力和问题解决技巧。
整个实验设计系列覆盖了从硬件认知、传感器应用到编程实践的全面知识,旨在培养学生的创新思维、动手能力和科学素养,适合于人工智能和机器人教育的初级阶段。每个实验都包含明确的目标、步骤、要点、注意事项和拓展活动,便于教学和自我学习。
机器人实验设计——以 Lego 9797 教育套装为例
技术教育与创新实验室·新闻与传播学院·陕西师范大学
10
英文单机版 NXT
编程环境
使用 LabVIEW 引擎专门为 NXT 机器人开发的图形化编程软件。功能强大,简
单易用。这个低起步、高发展的直观形象编程工具为教学研究和乐高爱好者提供了循
序渐进的编程环境。NXT 软件同样可以为连接在 NXT 微型电脑上 RCX 传感器和马
达编写程序。另外,NXT 机器人教育专用软件的特色在于配有简单的教学指导,每
个指导都有索引,因此可以很方便地查询检索。请关注功能更强大的软件升级版。
(11)其他
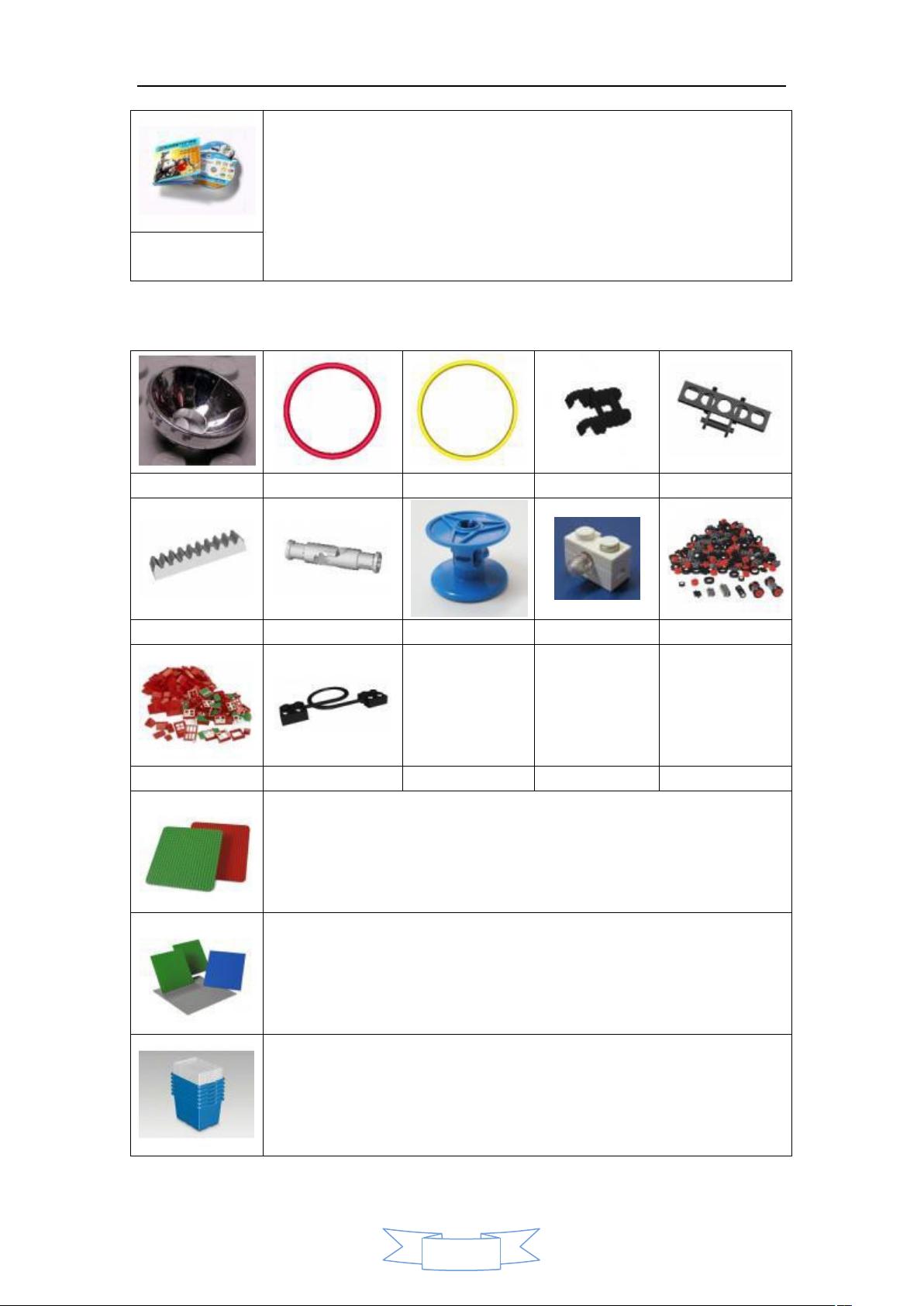
表 1-11 Lego 组件——其他
灯罩
24 红色橡皮筋
33 黄色橡皮筋
细链条
宽链条
1*4 齿条
万向节
卷线筒
1*2 灯泡
轮子组合:
窗、门和屋顶瓦片组合
128MM 导线
LEGO DUPLO 大底板组合:2 块 LEGO DUPLO 大底板,一块红色,一块绿色,
提供了游戏搭建时极好的底座,适合各种 LEGO DUPLO 积木,尺寸 38*38cm
乐高大底板组合:包括了 1 块 38*38cm 的灰色底板,2 块 25*25cm 绿色底板
和 1 块 25*25cm 蓝色底板的组合,如让蓝色作海洋,绿色当草地。
储物箱:这个新的储物箱组合包含了 6 个箱子,可以稳固的重叠放置。每个箱子
都有排水孔,如此可以在箱子内清洗积木。(尺寸:54mm*32mm*44mm)



剩余82页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-11-10 上传
2020-06-19 上传
2024-03-31 上传
2022-11-03 上传
2022-06-13 上传
2015-12-23 上传

猫一样的女子245
- 粉丝: 230
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- gis编程Python语言_地图渲染;绘制地图_
- Group01W041515:与 Erik、Michelle、Rom、Tracy 和 Jeanne 的小组项目
- esp32-lora-library:ESP-32 IDF 的低级 Lora (SX127_) 库
- WinDeviceManagerLight:在Windows上启用和禁用设备
- Python库 | je_auto_control-0.0.80-py3-none-any.whl
- Unsupervised:无人监督的特征工程(Kmeans,PCA,NMF和Tsen)
- Institut-des-Algorithmes-du-S-n-gal:塞内加尔算法研究所
- 基于SSM的简易学生信息管理系统源代码+数据库
- MATLAB_用于基音识别的程序函数_
- vc++用鼠标移动一个按钮
- Python库 | je_auto_control-0.0.76-py3-none-any.whl
- python-heatclient:OpenStack编排(热)客户端。 在opendev.org上维护的代码镜像
- STSC:自调谱聚类Python
- JAVA语音通知源码-africastalking-java:官方JavaSDK
- math_chap03-159.zip_matlab__matlab_
- myfirstwindows_C#_income5j1_
