Matlab实现的直流永磁球形电机洛伦兹力矢量控制器
58 浏览量
更新于2024-09-02
收藏 347KB PDF 举报
"基于Matlab平台的球形电机控制器设计,实现了对直流永磁球形电机的洛伦兹力矢量控制。通过Matlab设计的上位机程序与DSP2407控制器的硬件配合,成功地控制电机实现三自由度运动。"
在直流永磁球形电机的控制领域,洛伦兹力矢量控制方法是一种有效的策略。这种控制方法基于南洋理工大学提出的电机模型,其中转子由四个永磁体构成,定子则由两层线圈布局,通过计算和调整电流来产生精确的洛伦兹力,引导转子的运动。洛伦兹力的数学表达式为F = q(v × B),其中F是作用力,q是导体电荷,v是导体速度,B是磁场强度。通过巧妙设计电流分布,可以使得电机在三维空间中实现精确的定位和运动。
在Matlab环境中,控制系统的设计包括了对电机状态的实时监测和控制策略的实施。上位机程序负责处理计算任务,如计算旋转轴的方向n、球面洛伦兹力切矢量f、旋转角度θ以及永磁体的新坐标P2。用户输入期望的坐标和电流权重,系统会检查并防止永磁体超出线圈边界,确保安全运行。计算完成后,上位机将电流控制字通过串口通信函数serial发送给下位机,这里下位机通常是一个数字信号处理器(DSP),如DSP2407,它接收控制字并转换为实际的电压控制信号,驱动电机线圈产生相应的洛伦兹力。
球形电机控制器的硬件设计包含了D/A转换芯片,用于将上位机的数字信号转化为模拟电压,进而控制电机线圈的电流。此外,RS232接口电路连接上位机和下位机,实现两者之间的通信。控制器的设计目标是确保各电流矢量合成的洛伦兹力方向与球面的切矢量一致,从而使永磁体沿预设轨迹旋转,实现电机的高精度三自由度运动。
总结起来,基于Matlab的球形电机控制器设计涵盖了理论建模、软件开发和硬件实现等多个层面,成功地应用于直流永磁球形电机的洛伦兹力矢量控制,展示了其在多自由度运动控制中的潜力。这一技术对于精密定位、复杂运动路径的执行等应用具有重要意义,如机器人操作、精密仪器的驱动等。
基于基于Matlab平台的球形电机控制器设计平台的球形电机控制器设计
针对直流永磁球形电机的控制原理,提出了基于洛伦兹力的直流永磁球形电机的矢量控制方法。在Matlab平台
上实现该球形电机控制算法,同时验证了该算法。利用Matlab设计了球形电机控制器的上位机程序,并以
DSP2407为控制器制作了球形电机控制器的硬件部分。实验结果展现了球形电机控制器的性能, 实现了球形电机
洛伦兹力矢量控制。
目前,针对多自由度电机的结构已进行了广泛的研究,三自由度电机作为一种多自由度执行元件,其输出轴的末端能够在
工作空间内实现多自由度运动。
为了实现球形电机的三自由度控制,利用基于洛伦兹力球形电机
本文提出的球形电机控制算法,通过计算机的帮助,完成了电机控制器的设计。
1 基于洛伦兹力矢量控制方法基于洛伦兹力矢量控制方法
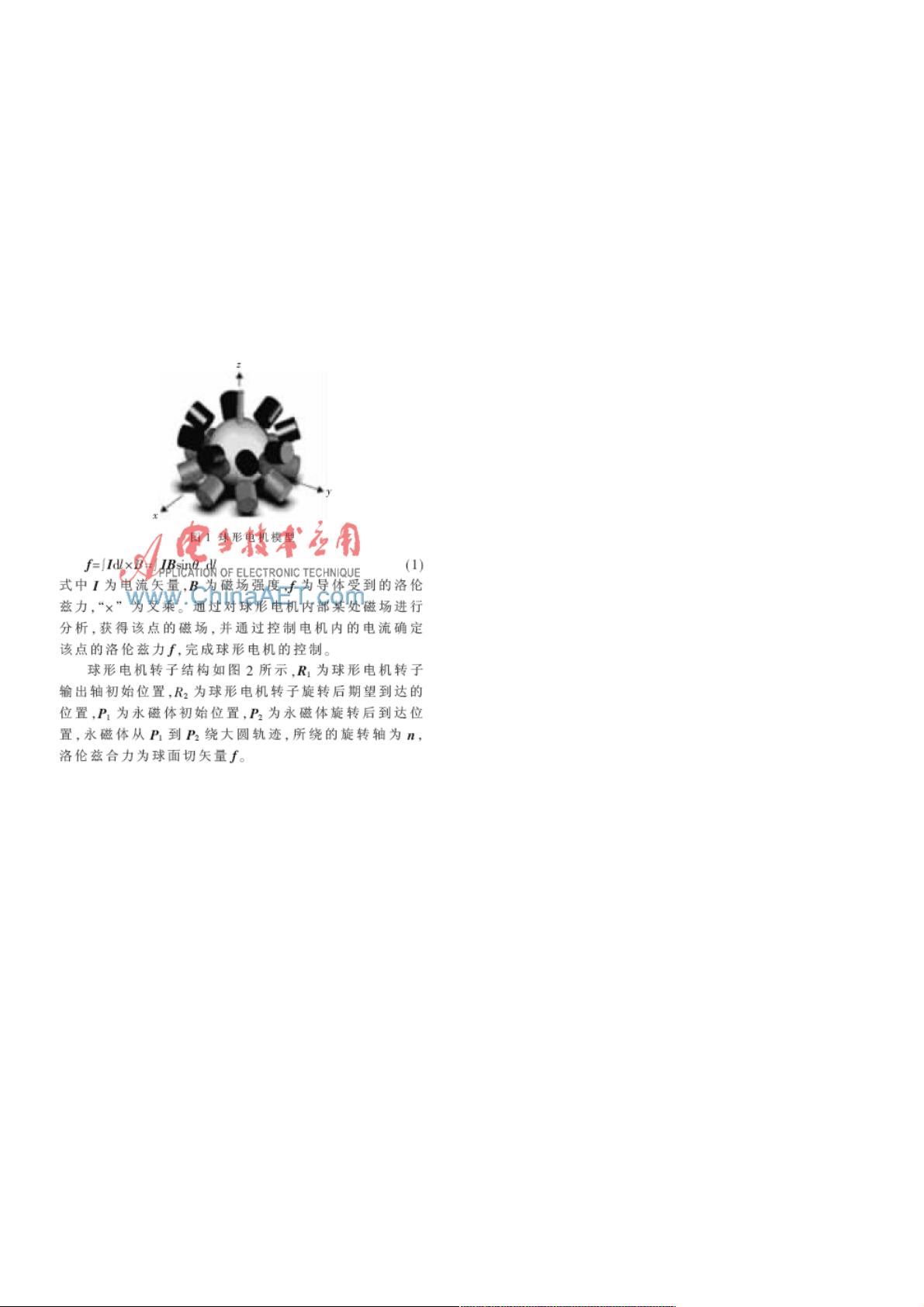
南洋理工大学提出的电机模型[1-2],其电机的控制采用洛伦兹力方法,结构如图1所示。该电机的转子有4个钕铁硼永磁体,放
置在球体转子赤道上,定子由摆放在赤道南北两侧±11°的两层线圈组成,每层为间隔均匀的8个线圈。
一个给定的载流导体在磁场内受到的洛伦兹力为:
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
347 浏览量
2019-09-05 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-09-15 上传
152 浏览量

weixin_38735544
- 粉丝: 1
- 资源: 944
 我的内容管理
展开
我的内容管理
展开







最新资源
- cockpit-samba-manager.zip
- java源码查看-ezpublish-groupdocs-viewer-java-source:ezpublish-groupdocs-vie
- 带有科技感的平板电脑与数据背景图片PPT模板
- 互联网思维学习网络营销策划方案ppt模板.zip
- next-js-博客评论
- ML-Thon-Prediction
- scrapStackExchange:废弃各种堆栈交换站点,以观察各种编程语言的使用趋势
- IDEA新建mybatis遇到不能执行的问题.zip
- 创新生活商务平台网页模板
- 酱茄Free主题(资讯/媒体/博客WordPress主题)开源版
- 书籍黑板背景卡通风论文答辩通用ppt模板.zip
- e1039-data-mgt
- java源码查看-htmlarea-groupdocs-viewer-java-source:htmlarea-groupdocs-viewe
- main.github.io
- 1953-2010年 全国6次人口普查数据汇总.zip
- 中秋节声效动画ppt模板——锐普公司出品.rar
