多路径场景下的多目标跟踪:MP-GLMB滤波器
144 浏览量
更新于2024-08-26
收藏 231KB PDF 举报
"多路径广义标记多伯努利滤波器是一种针对雷达目标跟踪问题的新型算法,尤其适用于处理因多径传播导致的目标产生多个检测的情况。该算法基于标记随机有限集(Labeled Random Finite Set, LRFS)理论,能够有效估计目标数量及其状态轨迹。"
在传统的多目标跟踪算法中,通常假设每个目标在每次扫描时最多产生一个检测信号。然而,在超过地平线雷达(Over-the-Horizon Radar, OTHR)系统中,由于多径传播效应,单个目标可能产生多个检测信号。为了解决这个问题,本文提出了多路径广义标记多伯努利滤波器(Multipath Generalized Labeled Multi-Bernoulli, MP-GLMB)算法,它能够有效地在存在多个检测信号的系统中追踪多个目标。
MP-GLMB滤波器的核心在于利用标记随机有限集框架,这一框架不仅能够估计目标数量,还能跟踪每个目标的状态轨迹。与现有的多路径概率假设密度(Probability Hypothesis Density, PHD)滤波器和多目标多伯努利(Multi-Target Multi-Bernoulli, MeMBer)滤波器相比,MP-GLMB滤波器在模拟实验中显示出了更优的跟踪性能。
在介绍部分,作者们强调了多目标跟踪问题的复杂性,特别是当目标数目未知且随时间变化时。他们指出,OTHR系统中的多径传播增加了跟踪的难度,因为这会导致目标表示为一组非独立同分布的检测。MP-GLMB滤波器正是为解决这一挑战而设计的。
文章进一步可能会详细讨论MP-GLMB滤波器的数学模型和实现步骤,包括如何处理多径检测、如何更新和预测目标状态、以及如何通过LRFS理论进行目标合并和分割。此外,可能会有对比实验结果,展示MP-GLMB滤波器在精度、鲁棒性和计算效率方面的优势。
这篇研究论文对多径传播环境下的多目标跟踪技术进行了深入探索,提出了一种新的滤波器方法,对于雷达目标跟踪领域具有重要的理论和实践价值。通过采用MP-GLMB滤波器,可以提高在复杂条件下多目标跟踪的准确性和效率。
Multipath Generalized Labeled Multi-Bernoulli Filter
Bin Yang, Jun Wang, Wenguang Wang, and Shaoming Wei
School of Electronic and Information Engineering, Beihang University, Beijing, China
Email:young
being@126.com
Abstract—Traditional multitarget tracking algorithms assume
that each target can generate at most one detection per scan.
However, in the over-the-horizon radar (OTHR), a target may
produce multiple detections because of multipath propagation.
In this paper, we propose a new algorithm, called multipath gen-
eralized labeled multi-Bernoulli (MP-GLMB) filter, to effectively
track multiple targets in such multiple-detection systems. The
proposed technique is based on the labeled random finite set
(RFS), which estimates the number of targets and the trajectories
of their states. The proposed MP-GLMB filter is compared with
the multipath version of the probability hypothesis density (PHD)
filter and the multi-target multi-Bernoulli (MeMber) filter, and
simulation results show that our algorithm has improved tracking
performance.
I. INTRODUCTION
Multitarget tracking problem involves estimating an un-
known and time-varying number of targets and their corre-
sponding trajectories by using measurements from sensors.
Three major algorithms, namely, the Multiple Hypothesis
Tracker (MHT), the Joint Probabilistic Data Association Fil-
ter (JPDAF) and algorithms based on the random finite set
(RFS) theory have been proposed to deal with problems in
multitarget tracking, such as nonunity probability of detection,
presence of spurious measurements (clutter), and uncertainty
of measurement-target association [1], [2], [3], [4], [5].
In these algorithms, a common assumption is that one target
produces at most one measurement in every scan, which is
valid in single-detection systems. However, in many practical
scenarios, one target can generate more than one detection
per scan. A well-known example of such a system is the
over-the-horizon radar (OTHR) [23], [24], [25], [26], which
radar signals from the same target are propagated by multiple
paths (MPs) due to multiple ionospheric layers. These multiple
detections (MDs) in receiver of OTHR bring benefit and
disadvantage to the tracking algorithms simultaneously. If the
MDs from multipath propagation can be exploited effectively,
the performance of the tracking algorithm will be improved
greatly. But the tracking with MDs needs to solve not only
measurement-target association, but also measurement-path
association, which requires complex algorithm. Based on the
JPDA framework [8] and the MHT framework [9], MD-JPDA
filter [29] and MD-MHT algorithm [28] were proposed, re-
spectively, to tracking multiple targets with multiple detections
in OTHR. Since the RFS approach, such as the probability
hypothesis density (PHD) filter [10], [14] and the multi-target
multi-Bernoulli (MeMber) filter [5], [12], can avoid the data
association, the MD-PHD filter [31] and the MP-CBMeMBer
filter [32] have been proposed as tractable Bayesian filters with
low complexity in OTHR.
However, these RFS-based filters only estimate target states
at individual time instants and not provide target trajectories.
In order to overcome this limitation, [15], [16] appended an
unique label to RFS, which called labeled RFS, and linked
the target states with the same label at different scan to form
the trajectory of targets. Since the generalized labeled multi-
Bernoulli (GLMB) RFS is conjugate prior to the multitarget
point measurement model, the GLMB filter and the δ-GLMB
filter have been proposed as tractable Bayesian multitarget
trackers.
In this paper, we develop a GLMB filter, which called MP-
GLMB filter, for multipath multitarget tracking. First, we de-
rive the likelihood function of the multipath observation model.
Then, we provide the recursion of the GLMB density with
multipath observation likelihood inspired by the GLMB filter
for extended target tracking [33], which is another multiple
detection tracking problem. Furthermore, we propose a joint
prediction/update formulation [18] of the MP-GLMB filter and
implement it by using Murty’s algorithm [20], [21].
The rest of the paper is organized as follows. In Section II,
we present the problem description of the multipath system and
the background on labeled RFS filtering. The derivation and
implementation of the MP-GLMB are provided in Section III.
Simulation results are given in Section IV. Finally, in Section
V, conclusions are discussed.
II. P
ROBLEM DESCRIPTION AND BACKGROUND
In this section we provide the mathematical preliminaries
of the multipath multitarget tracking problem in OTHR. We
also briefly review the background of the labeled RFS.
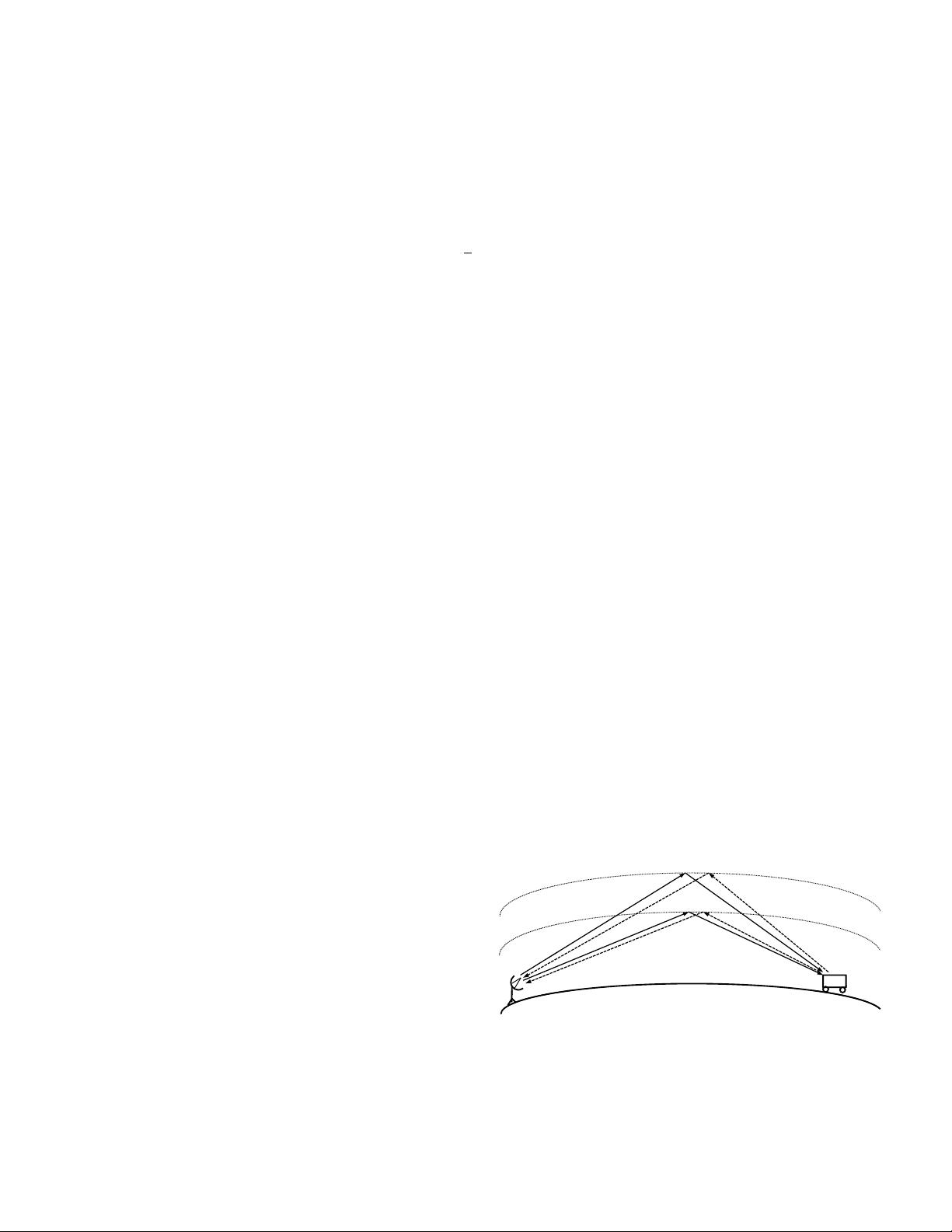
A. Multipath System
)OD\HU
(OD\HU
5DGDU
7DUJHW
Fig. 1: OTHR multipath propagation modes.
The OTHR can detect targets beyond the horizon by using
internal reflection of high frequency radio waves through the
ionospheric layer. There are two major ionospheric layers E
and F scatter the radar signal from transmitter to targets and
2018 21st International Conference on Information Fusion (FUSION)
978-0-9964527-7-9 ©2018 ISIF 1423
下载后可阅读完整内容,剩余6页未读,立即下载
2021-01-12 上传
2021-03-21 上传
2021-03-09 上传
点击了解资源详情
2020-12-15 上传
2021-03-29 上传
2021-03-06 上传

weixin_38637272
- 粉丝: 4
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
