2018年IEEE小型嵌入式系统RTOS标准:μT-Kernel关键特性与应用
版权申诉
IEEE Standard for a Real-Time Operating System (RTOS) for Small-Scale Embedded Systems - 2018 是由IEEE Standards Committee发起并针对小型嵌入式系统设计的一种实时操作系统规范。该标准特别关注那些拥有16位CPU、内存资源有限(如ROM/RAM)且可能不配备内存管理单元(MMU)的系统,如单芯片微计算机。标准的核心目标是确保这些小型设备能够提供可靠、高效的实时性能,以满足苛刻的时间敏感任务需求。
标准定义了一种名为μT-Kernel的实时操作系统,它专为这类小型系统设计,旨在简化开发过程并增强系统在执行定时任务、中断处理、以及应用程序编程接口(API)调用时的响应速度。μT-Kernel强调了以下几个关键特性:
1. **硬件兼容性**:该RTOS支持16位CPU架构,这意味着它能够有效地与各种低成本、低功耗的微控制器和嵌入式处理器集成,满足不同应用场景的需求。
2. **资源管理**:针对内存资源受限的情况,μT-Kernel提供了高效的记忆管理和资源分配策略,确保系统的稳定性和内存利用率。
3. **报警处理**:对于实时性要求高的任务,μT-Kernel提供了强大的报警处理机制,确保关键事件能够得到及时响应,如定时器中断或外部输入信号处理。
4. **API设计**:标准定义了一套清晰易用的应用程序编程接口,使得开发者可以快速开发出功能丰富且运行高效的实时应用,降低了软件开发的复杂度。
5. **标准化与授权**:IEEE Std 2050™-2018 是一个受版权保护的成果,其使用权限仅限于指定机构——University of Kentucky,下载自IEEE Explore平台,且可能存在使用限制。
IEEE Standard for a Real-Time Operating System (RTOS) for Small-Scale Embedded Systems-2018 是一个重要的技术指南,为小型嵌入式系统的实时性控制和高效能设计提供了统一的标准,有助于推动这类系统在物联网、工业自动化、消费电子等领域的广泛应用。

IEEE Std 2050-2018
IEEE Standard for a Real-Time Operating System (RTOS) for Small-Scale Embedded Systems
6
Copyright © 2018 IEEE. All rights reserved.
3.1.10 Implementation-defined
Implementation-defined means that something is not standardized in the µT-Kernel specification, but must
be defined for each implementation. The specifics of the implementation should be described clearly in the
implementation specifications. In application programs, the portability for the portion dependent on
implementation-defined items is not assured.
3.1.11 Implementation-dependent
Implementation-dependent means that in the µT-Kernel specification, the behavior of something varies
according to the target systems or system operating conditions, and cannot and/or should not be specified.
The behavior should be defined for each implementation. The specifics of the implementation should be
described clearly in the implementation specifications. In application programs, the portion dependent on
implementation-dependent items needs to be modified when porting in principle.
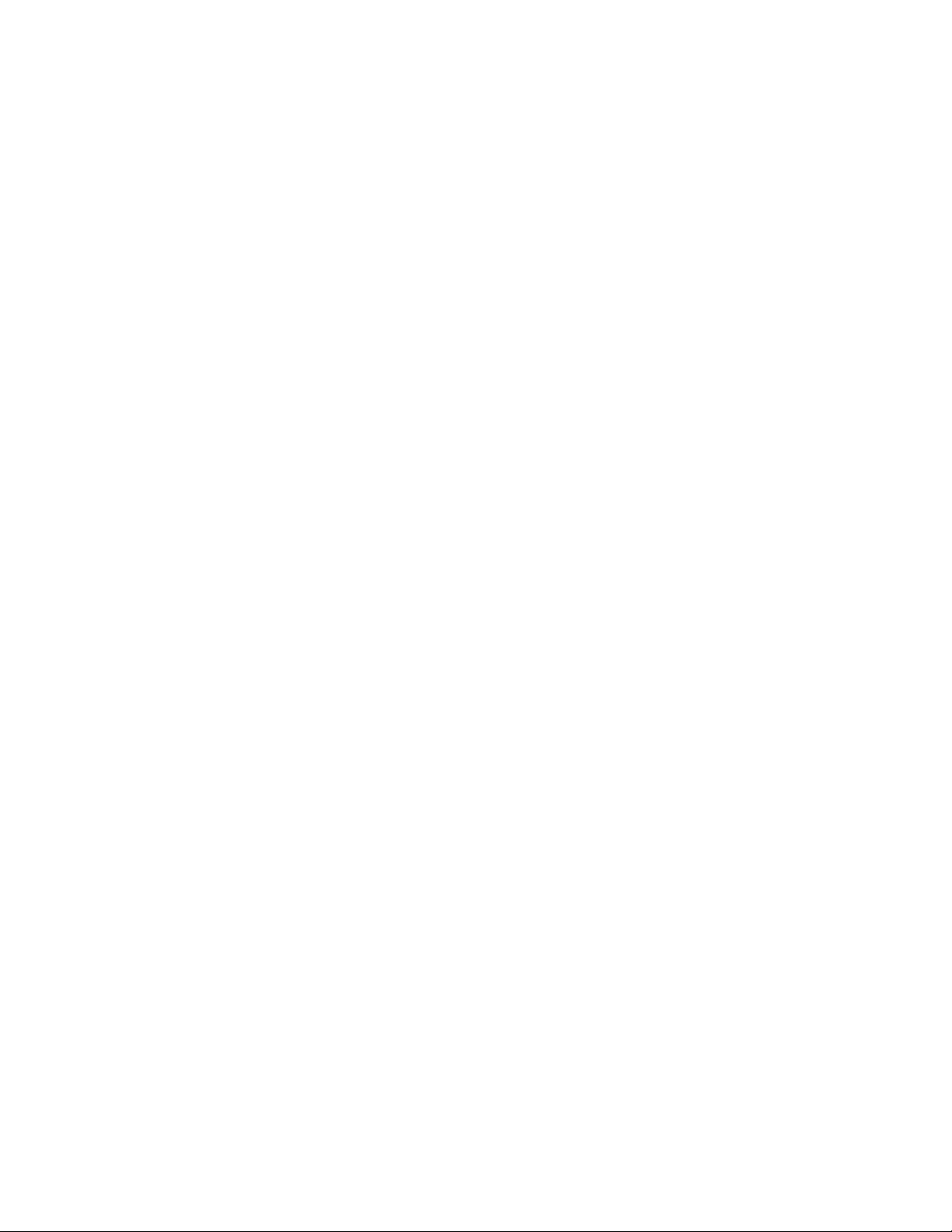
3.2 Task states and scheduling rules
3.2.1 Task states
Task states are classified into the following five states. Of these, waiting states are further classified into
three states. Saying that a task is in a runnable state means it is in either a RUNNING state or a READY
state.
3.2.1.1 RUNNING state
The task is currently being executed. When a task-independent portion is executing, except when otherwise
specified, the task that was executing prior to the start of task-independent portion execution is said to be in
a RUNNING state.
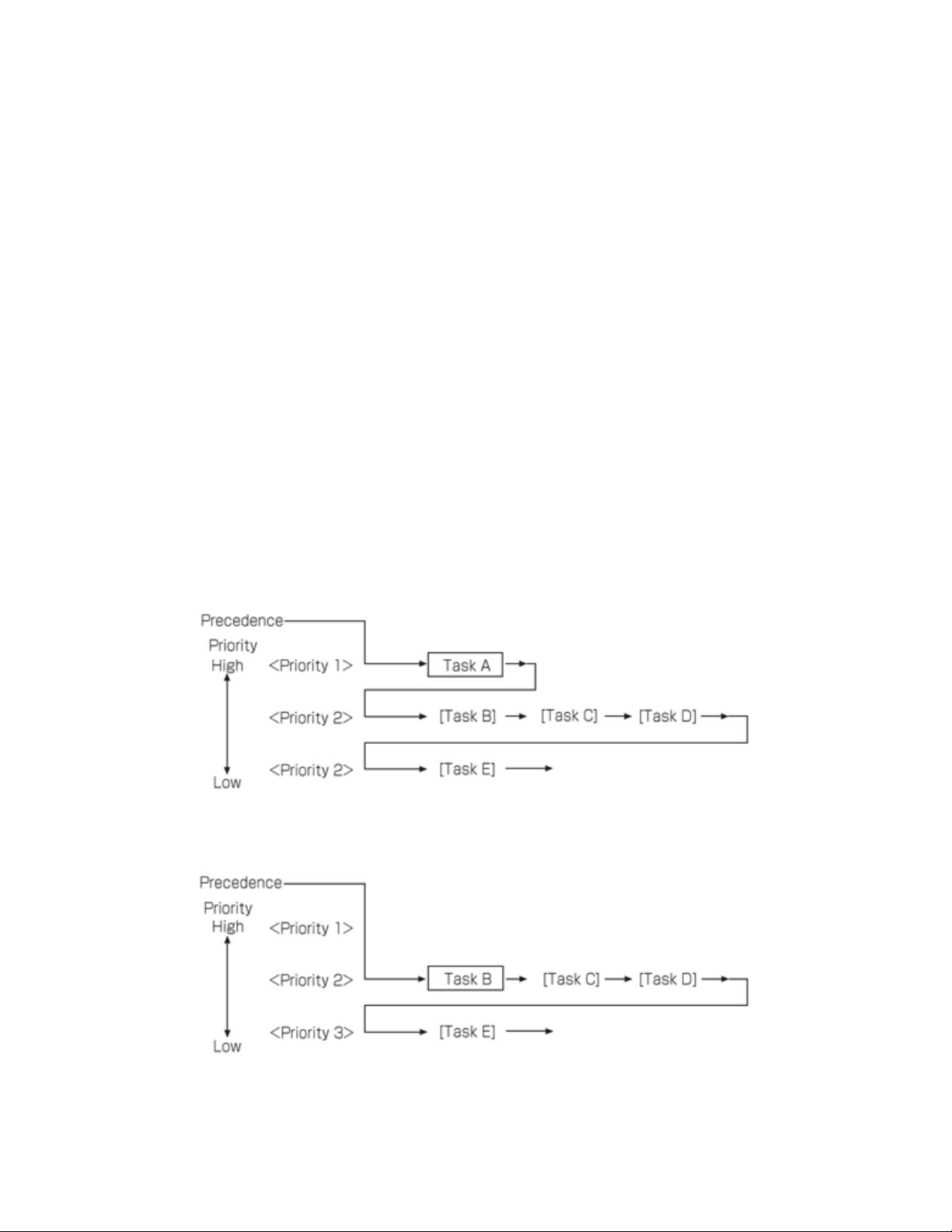
3.2.1.2 READY state
The task has completed preparations for running, but cannot run because a task with higher precedence is
running. In this state, the task is able to run whenever it becomes the task with the highest precedence
among the tasks in a READY state.
3.2.1.3 Waiting states
The task cannot run because the conditions for running are not in place. In other words, the task is waiting
for the conditions for its execution to be met. While a task is in one of the waiting states, the program
counter and register values, and the other information representing the program execution state, are saved.
When the task resumes running from this state, the program counter, registers, and other values revert to
their values immediately prior to going to the waiting state. This state is subdivided into the following three
states:
a) WAITING state
Execution is stopped because a system call was invoked that interrupts execution of the invoking
task until some condition is met.
Authorized licensed use limited to: UNIVERSITY OF KENTUCKY. Downloaded on August 27,2018 at 16:14:07 UTC from IEEE Xplore. Restrictions apply.
剩余332页未读,继续阅读
2010-01-30 上传
2018-09-11 上传
2024-05-14 上传
2022-09-24 上传
2019-11-13 上传
2021-04-12 上传
2021-09-27 上传
2021-02-10 上传
2012-02-26 上传

汽车通信技术
- 粉丝: 2w+
- 资源: 74
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
