TJA1020 LIN Transceiver应用指南:低功耗解决方案
需积分: 10 158 浏览量
更新于2024-07-20
收藏 949KB PDF 举报
AN00093_TJA1020_APP_Hints.pdf 是一份由Koninklijke Philips Electronics N.V.发布的应用笔记,主要针对TJA1020 LIN (Local Interconnect Network) 串行通信收发器进行详细介绍。TJA1020是一款专为汽车和工业应用设计的低功耗LIN收发器,它支持LIN协议规范中定义的单线束信号,适用于在车辆内部的类A控制数据传输场景,这种应用环境通常包括一个主节点和一组从属节点。
这份文档的关键词集中在TJA1020 LIN Transceiver的物理层功能上,特别强调了它对于ISO 9141标准的支持。ISO 9141是与LIN协议相关的标准之一,用于诊断和接口通信,确保车辆电子系统之间的可靠连接。
应用笔记的目的是提供使用TJA1020进行LIN应用的详细指南,包括但不限于硬件配置、接口设置、数据传输流程、错误检测与处理、功耗优化以及可能遇到的问题及解决方案。文档共包含44页的内容,涵盖了从产品概述、引脚功能解释到典型电路设计示例的全面信息。
在阅读和实施TJA1020时,用户可以参考文档中的示例代码、测试案例和注意事项,以确保在实际应用中能够正确、高效地集成和运行LIN通信。此外,文档还提供了联系信息,如Philips Semiconductors的网站地址和客户服务邮箱,以便用户在遇到问题时获取进一步的技术支持。
AN00093_TJA1020_APP_Hints.pdf是一份实用的参考资料,对于任何想要在汽车电子或工业控制领域使用TJA1020 LIN收发器的工程师来说,理解和掌握其中的内容至关重要。通过这份文档,工程师能够提升对LIN协议的理解,优化系统性能,并确保满足严格的工业标准和安全要求。
AN00093_2 © Koninklijke Philips Electronics N.V. 2005. All rights reserved.
Application note Rev. 02 — 16 September 2005 8 of 44
Philips Semiconductors
AN00093
TJA1020 LIN transceiver
and Section 2.3.4). This is useful for applications where the microcontroller supply is not
controlled by the INH output and thus, the microcontroller could activate the transceiver at
any time.
The TJA1020 is protected against unwanted wake-up events caused by automotive
transients or EMI. For this purpose the transceiver provides filters and/or timers at the
input of the receiver (LIN), of the local wake-up input (NWAKE) and of the sleep control
input (NSLP). Therefore all wake-up events have to maintain for a certain time period
(t
BUS
, t
WAKE
and t
gotonorm
).
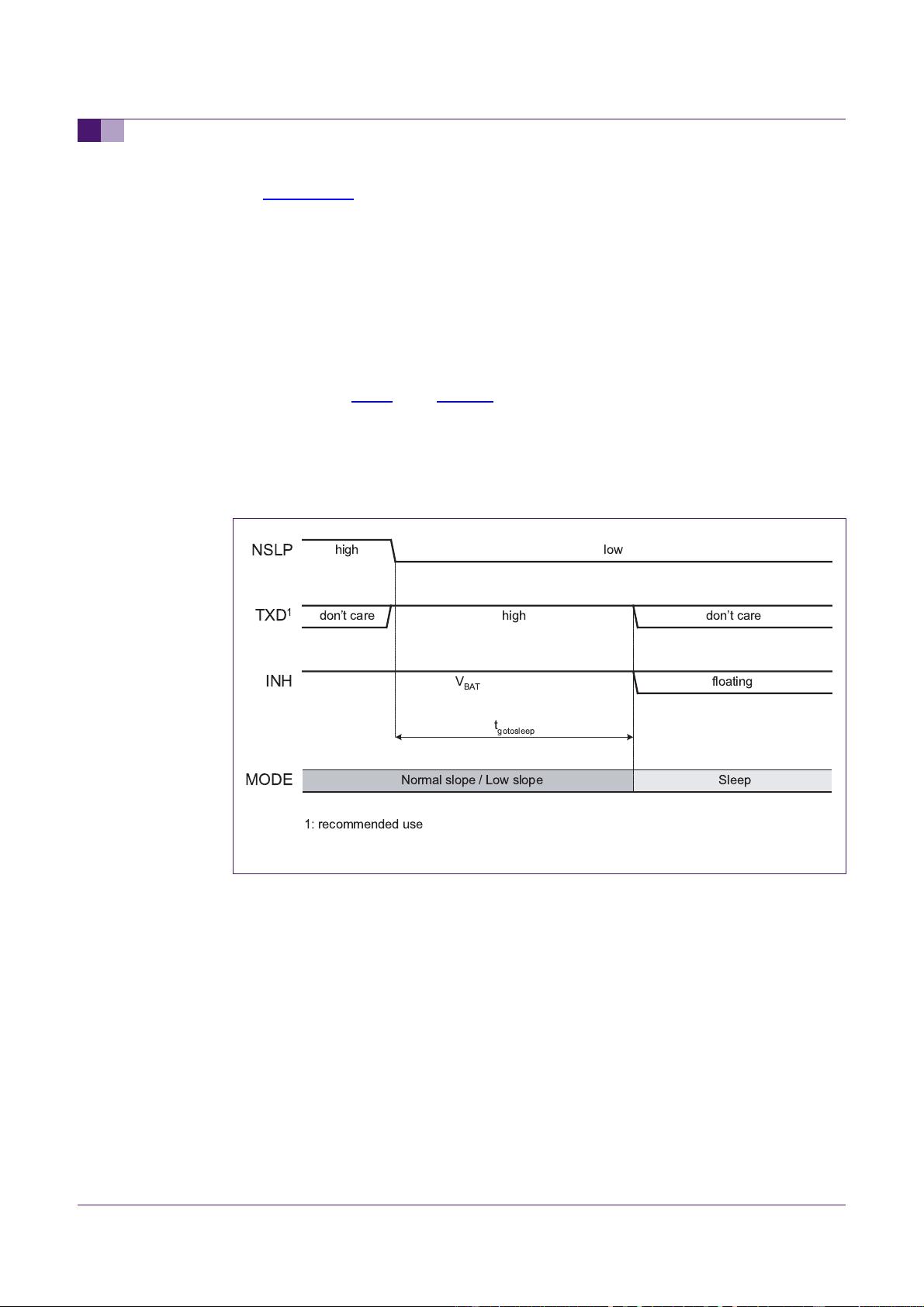
The Sleep mode is entered if a low level at the sleep control input pin NSLP maintains for
at least t
gotosleep
(Ref. 1) (see Figure 6) and no wake-up event (remote or local) happens
within this time. This filter time prevents unintended transitions towards Sleep mode
caused by EMI. During the mode transition it is recommended to keep TXD on high level
to avoid generation of unintended wake-up events on the LIN bus. The activation of the
Sleep mode is even possible, if LIN and/or NWAKE are clamped to ground, e.g. caused by
a short-circuit to ground.
During Sleep mode, the internal slave termination resistor R
SLAVE
between LIN and BAT is
disabled; only a weak current source is present. This minimizes the current consumption
in case LIN bus is short-circuited to ground.
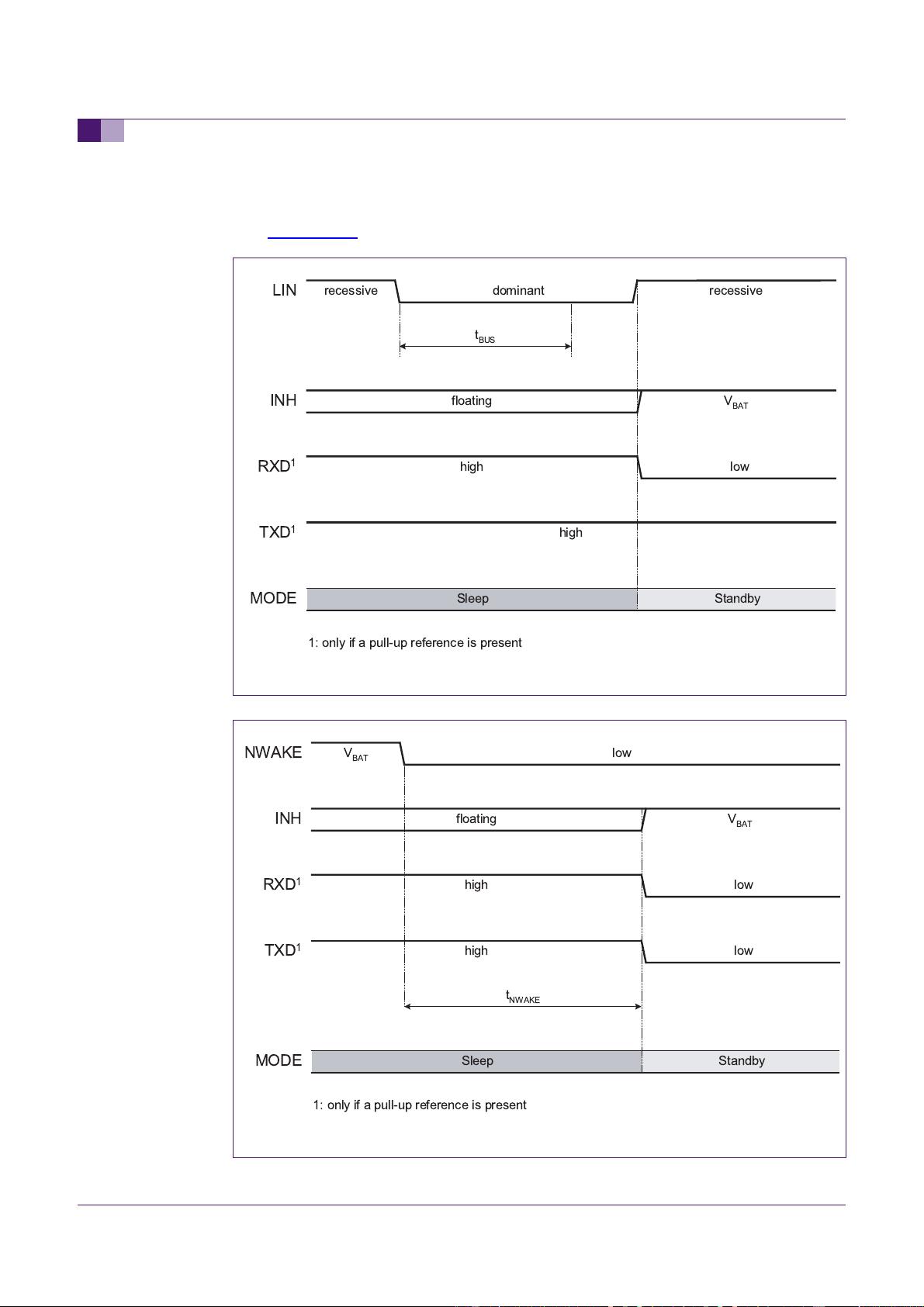
2.3.2 Standby mode
The Standby mode is an intermediate mode that is entered only, if a remote or local
wake-up occurs while the TJA1020 is in its Sleep mode. In Standby mode the INH pin
outputs a battery related high level and therefore can activate an external voltage
regulator. In addition the internal slave termination resistor R
SLAVE
between LIN and BAT
is activated.
The TJA1020 signals the Standby mode with a low level at the RXD pin. This can be used
as wake-up interrupt request for a microcontroller. Furthermore the wake-up source is
signalled by the pull-down condition at the TXD pin. A remote wake-up event results in a
Fig 6. Sleep mode timing
NSLP
floating
INH
Normal slope / Low slope Sleep
V
BAT
high
MODE
low
t
gotosleep
TXD
1
high dont caredont care
1: recommended use
剩余43页未读,继续阅读
2017-09-13 上传
2022-07-14 上传
2022-07-15 上传
2019-04-08 上传
2021-10-09 上传
2022-07-14 上传
2022-07-14 上传

2073
- 粉丝: 5
- 资源: 37
 我的内容管理
展开
我的内容管理
展开







最新资源
- ConcurrentStudy:Java并发编程和netty中学习加强相关代码
- 与一只巨大的鸡战斗至死:一场史诗般的最终幻想风格的战斗,对抗具有动态界面的 AI 控制的鸡:P-matlab开发
- Parstagram
- dsc字符串实验室在线ds-pt-090919
- UMLS-explorer
- txline,微带线计算工具
- OPPOR9S OPPOR9Splus原厂维修图纸电路图PCB位件图资料.zip
- stocks-chaser-frontend:库存跟踪应用
- 通过非线性导数进行边缘检测:这个简短的演示展示了一种有效的边缘检测算法。-matlab开发
- mariebeigelman.github.io
- AnoClient
- 开发基于JSP Servlet JavaBean的网上交易系统(JSP Servlet JavaBean Web Service
- Weather Forecast-crx插件
- go-jsonrpc-websocket.rar
- AM调制和解调研究:这个演示有助于研究和分析AM MOD和DEMOD。-matlab开发
- gocloud-secrets-awssecretsmanager
