光学设计实战:Zemax计算机辅助应用
"《实用计算机辅助镜头设计》是关于Zemax光学设计的英文经典书籍,由Willard S. Bell公司出版,作者通过本书分享了他四十多年的光学研究经验,涵盖了从基础理论到实际应用的广泛知识。"
在光学设计领域,Zemax是一款广泛使用的软件工具,它能够帮助设计师进行复杂的光学系统建模、优化和分析。本书"Practical Computer-Aided Lens Design"深入浅出地介绍了如何利用Zemax进行计算机辅助光学设计。作者将自己在光学科学领域的深厚背景与实践经验相结合,为读者提供了详尽的指导。
全书内容可能包括以下几个主要知识点:
1. **光学基础知识**:涵盖光的基本性质,如光的传播、反射、折射和干涉等,这些是理解光学设计的基础。
2. **Zemax软件介绍**:讲解Zemax的界面、工作流程,以及如何创建和编辑光学元件模型,包括透镜、反射镜、光阑等。
3. **光学系统建模**:介绍如何使用Zemax构建实际光学系统的几何模型,包括系统配置、光线追迹和像差分析。
4. **光学设计优化**:讨论如何通过Zemax的优化工具调整系统参数,以达到最佳性能,例如最小化像差、提高分辨率或改善光束质量。
5. **实际应用案例**:可能包含多个实际光学设计案例,如相机镜头、望远镜、激光器等,展示如何应用所学知识解决实际问题。
6. **光束传播和成像理论**:深入探讨光束在不同介质中的传播,以及如何通过光学系统形成清晰的图像。
7. **非理想条件下的光学设计**:包括考虑像差校正、色散、热效应等因素对设计的影响,以及如何处理这些复杂情况。
8. **实验与实践**:可能提供一些实验设计和数据分析的建议,帮助读者将理论知识转化为实际操作能力。
9. **光学材料和制造**:介绍不同光学材料的特性,以及如何选择和处理这些材料以满足设计需求。
10. **光学设计的工程和生产考虑**:讨论光学设计与实际制造过程的接口,包括公差分析和成本估算。
这本著作不仅是对光学设计理论的全面阐述,也是对Zemax软件应用的实用指南,适合光学工程专业学生、研究人员和从业人员学习参考。作者通过个人经历和对光学的热爱,将理论与实践完美融合,为读者呈现了一部宝贵的光学设计资源。
18 Chapter 4.3
L¡ght and lmaging Systems
or flux
density)
varies directly as the square of the
image NA. and iuversely as the
sqr-rale of
the eflective
inragefTnurnber.
A.3.7
Marginal and Chief Rays
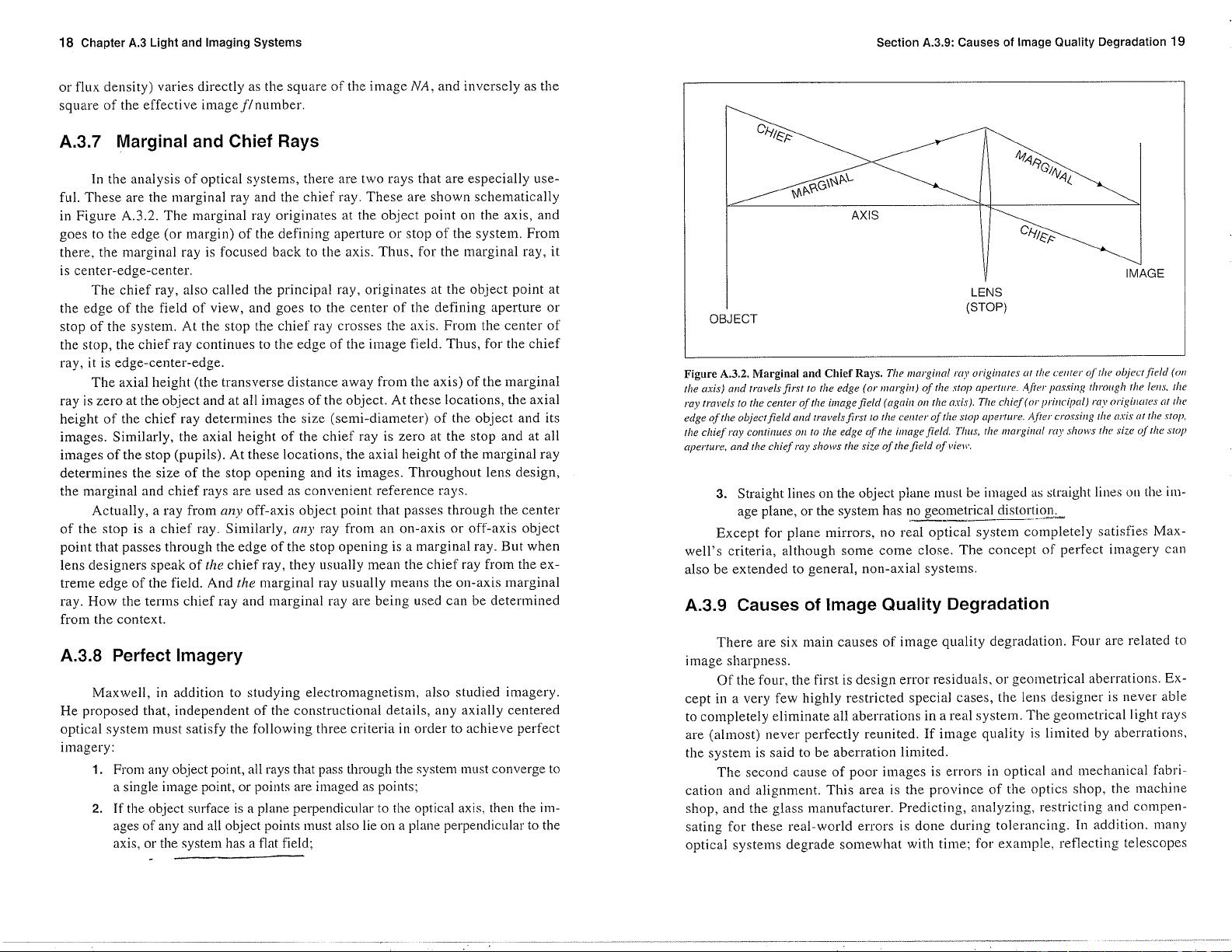
In the analysis of
optical
systems,
thele are two
rays
that are especially use-
ful. These are
the marginal ray and
the chief ray. These ale shown schernatically
in Figure A.3.2. The
rnalginal ray originates
at the object
point
on the axis,
and
goes
to the edge
(or
niargin) of the defining
aperture ol' stop of the system. Fron]
thele, the rnarginal ray is focused
back to the axis. Thus,
for the rnarginal ray, it
is center-edge-center.
The chief ray, also callecl
the
principal
ray, originates
ât the object
point
at
the edge of the field of
view,
ancl
goes
to the
center of the defining aperture or
stop of the systern. At
the stop the chief l'ay
crosses the axis. Fror¡ the
center of
the stop, the chief
ray continues to the
edge
of
the iruage field. Tlius,
for the chief
ray, it is edge-center'-edge.
The axial height
(the
transverse distance
away frorn the axis) of the rnarginal
ray is zero
at the
object
and at all irnages of
tlie object. At these locations,
the axial
height of
the chief ray cletermines
the
size
(semi-diameter)
of
the
object
and its
images. Similarly,
the axial height of the
chief ray is zero at the stop and
at all
irnages
of the stop
(pupils).
Atthese locations, the axial
height of the marginal ray
detennines the size of
the
stop
opening and its images.
Throughout lens design,
the marginal and chief rays
âre usecl as convenient reference rn¡'s.
Actually,
a
lay
frorn any off-axi" object
point that
passes
through the
center'
of
the stop is a chief lay. Simiiarly,
cuÐ'ray ftom au on-axis
ol off-axis object
point that passes through the edge of the stop opening
is zr rnarginal ray. But
when
lens
designers s¡reak of ¡åe chief
ray, they usually meau the
chief ray
fi'orn
the ex-
trenre edge of the fieìd. And the
rrarginal ray usually means the on-axis
rnarginal
ray. How the tel'lns chief ray
and marginal ray ate being
used car-r be detenniued
from
the context.
A.3.8
Perfect lmagery
Maxwell, in acldition to studying
electromagnetisrn. also studied
imagery.
He
ploposecl tlrat, independent of the colìstructiou¿ìl
details, any axially centered
optical
system
must
satisfy the following
three cliteria in older to
achieve
^erre¡r
imagery:
1. Flonr any ob.ject
point, atl rays that
pass
thlor-rgh
the system lnust converge to
a
single
irnage
point.
or
points
are iniaged
âs poirìts;
2. If the ob-ject surfàce is a
plane perpendicular to the optical axis. then
the irl-
ages of
any and all
object
points
must also lie on a
¡rlane
perpencliculal to tlre
axis,
or the system has
a flat fietd;
Section
4.3.9: Causes
of lmage Quality
Degradation 19
OBJECT
Figure
4.3,2, Marginal
ancl Chief Ra¡'s.
The marginal
ray
origittatas
ot tlrc centur oJ tlrc object
fie
ld
(on
the
axis) and rra,eLs
first
to the edge
(or
mdrgin) of
the
,stop
apciltrre. A.lter
pttssin¡¡
through
the lens, the
t ¿r\i
tt'ot)els lo the centcr of
lhe innge
field
(again
on î\rc a¡ìs).
Tlrc chic.f
(or
prittt i¡tal) rav oritirtttlt's
ot tlu'
edge
of the
object
.field
and tntvels
JirsÍ
to tllc certcr of llrc sto¡t
operturc. Alter
crossirtg tltc axis
ttt the sto¡t,
the chief
ra,t,
t:onliuucs
on to Ilrc edge
of rhe imaga.field.
TltLts, thc
ntargittul
trt-v.r/tott,s
(h?
si¿a o.Í
lha
sto!)
apeilure,
and tlrc chief ra¡' sltows
the size of the.fiald
rtJ viev.
3. Stlaight
lines on the object
plane must be
intagetl as stlaight
lines
on the iru-
age
plane,
01'the
system has
1:
S:g-melrical
distorti,on.
Except for
plane mirrors, no
t'eal optical systenl
cornpletely
satisfies
Max-
well's
criteria, although
some come
close. The
concellt of
perfect itnagely
can
also be
extended to
general,
non-axial
systetns.
4.3.9
Causes
of lmage
Quality
Degradation
There
ale six main
causes of
irnage
quality degraclation.
Fout'
are related
to
image
sharpness.
Of
the four, the first is
design error
residuals, or
geonletrical alrellatious.
Ex-
cept in
a very few highly
restricted special
cases,
the lens designer
is
uever
able
to cornpletely
elirninate ail
aberlations in
a
real
system.
The
geornetlical
light fays
are
(almost)
never
perfectly
leunited.
If image
quality is limited by
aberrations,
the systeln is said
to be aberration
limited.
The second
cause of
pool
images
is ellors
in optical
and urechanical
fabl'i-
cation and
alignruent. Tliis
area is the
plovince of
the optics sliop,
the
machine
sho¡t, ar-rd the
glass lnanufacturer'.
Predicting,
artal5,7i¡1o,
r'estlictiug
and
cotnpen-
sating for
these l'eal-world
erlors is done
duriug tolelancing.
In addition.
rttarty
optical
systenls
degrade somervlrat
with time:
for examl:le. reflectitlg
telescopes
ì-\
Ø44c>\
à"è---
LENS
(sroP)
剩余135页未读,继续阅读
点击了解资源详情
点击了解资源详情
158 浏览量
2008-11-14 上传
2018-02-26 上传
2009-05-23 上传
2018-07-30 上传

shengdacheng
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小型宽带微带天线设计与进展
- QTP 8.0 中文教程:自动化测试与脚本操作详解
- OPC UA基础解析 - 概述与概念RC中文版
- Proteus入门教程:无需实验板的51单片机仿真指南
- Java面试必备:核心知识点详解
- 万方视景科技:虚拟现实内容与项目专家
- Dialogic CTI技术入门到精通:系统工程师指南
- OBJ文件详解:格式、特点与基本结构
- ntop简易安装教程:快速部署流量监控
- Oracle初始化参数深度解析
- WebSphere MQ for z/OS 消息与代码手册
- JFreeChart 1.0.9 开发指南:免费资源与付费版本对比
- 使用Java与WebSphereMQ v6.0交互
- Win32下MinGW与MSYS安装指南
- Linux软件安装指南:从新手到高手
- ADO技术详解:高效数据访问接口
