
20 CHAPTER 1. INTRODUCTION TO 3D ACQUISITION
random noise pattern, to make sure that there is enough texture. As still two cameras are used,
the projected pattern doesn’t have to be analyzed in detail. Local pattern correlations may suffice
to solve the correspondence problem. One can project in the near-infrared, to simultaneously take
color images and retrieve the surface texture without interference from the projected pattern. So
far, the problem with this has often been the weaker contrast obtained in the near-infrared band.
Many such integrated approaches can be thought of.
This said, there is no single 3D acquisition system to date that can handle all types of objects
or surfaces. Transparent or glossy surfaces (e.g. glass, metals), fine structures (e.g. hair or wires),
and repetitive structures (e.g tiles on a floor) may cause problems, depending on the system that
is being used. The next section discusses still existing challenges in a bit more detail.
1.5 Challenges
The production of 3D models has been a popular research topic already for a long time now,
and important progress has indeed been made since the early days. Nonetheless, the research
community is well-aware of the fact that still much remains to be done. In this section we list
some of these challenges.
As seen in the previous section, there is a wide variety of techniques for creating 3D models,
but depending on the geometry and material characteristics of the object or scene, one technique
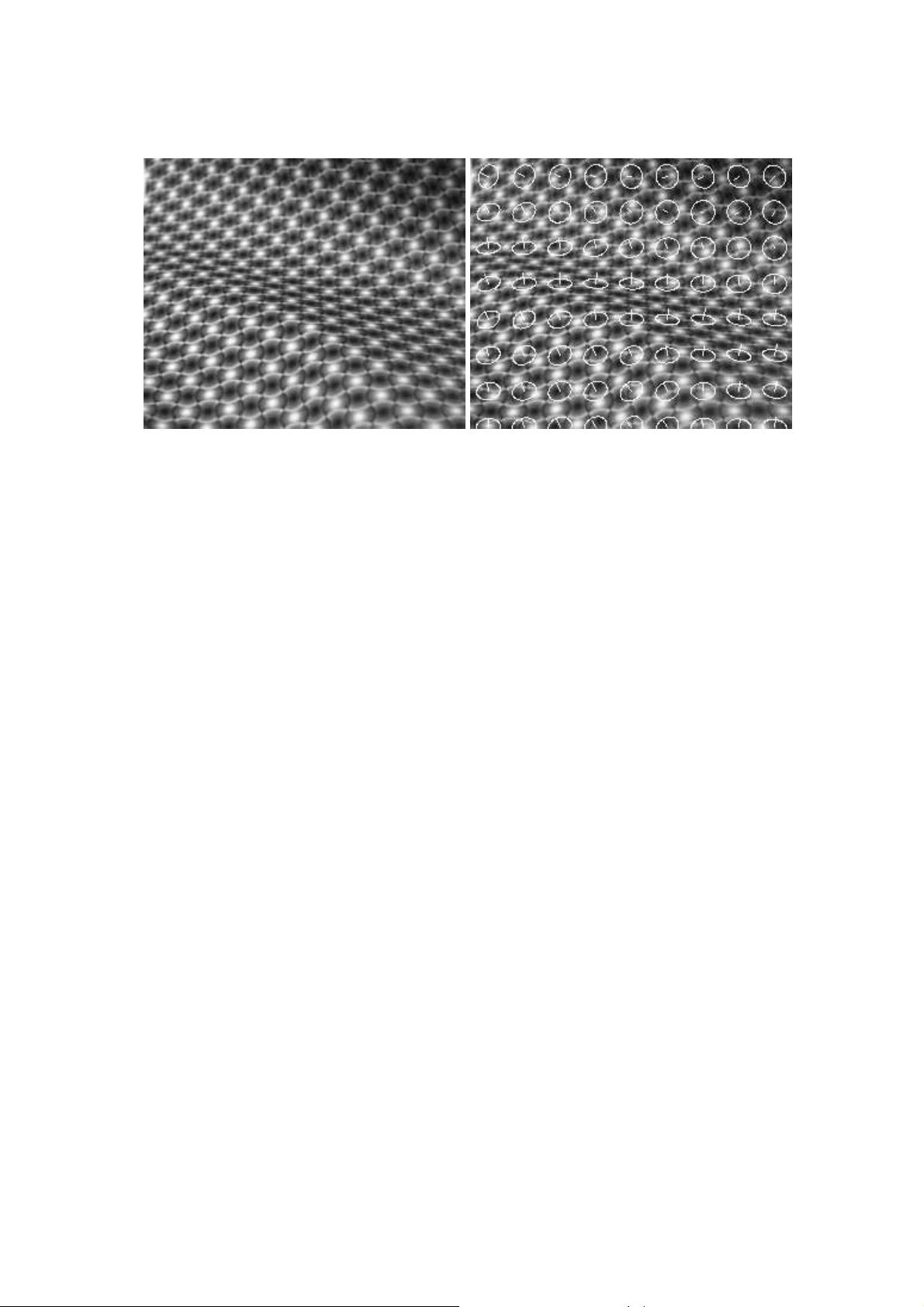
may be much better suited than another. For example, untextured objects are a nightmare
for traditional stereo, but too much texture may interfere with the patterns of structured-light
techniques. Hence, one would seem to need a battery of systems to deal with the variability of
objects – e.g. in a museum – to be modeled. As a matter of fact, having to model the entire
collection of diverse museums is a useful application area to think about, as it poses many of the
pending challenges, often several at once. Another area is 3D city modeling, which has quickly
grown in importance over the last years. It is another extreme in terms of conditions under
which data have to be captured, in that cities represent an absolutely uncontrolled and large-scale
environment. Also in that application area, many problems remain to be resolved.
Here is a list of remaining challenges, which we don’t claim to be exhaustive:
• Many objects have an intricate shape, the scanning of which requires great precision com-
bined with great agility of the scanner to capture narrow cavities and protrusions, deal with
self-occlusions, fine carvings, etc.
• The types of objects and materials that potentially have to be handled are very diverse,
ranging from metal coins to woven textiles; stone or wooden sculptures; ceramics; gems in
jewellery and glass. No single technology can deal with all these surface types and for some
of these types of artifacts there are no satisfactory techniques yet. Also, apart from the 3D
shape the material characteristics may need to be captured as well.
• The objects to be scanned range from tiny ones like a needle to an entire landscape or city.
Ideally, one would handle this range of scales with the same techniques and similar protocols.
• For many applications, data collection may have to be undertaken on-site under potentially
adverse conditions or implying transportation of equipment to remote sites.
• Objects are sometimes too fragile or valuable to be touched and need to be scanned ’hands-
off’. The scanner needs to be moved around the object, without it being touched, using
portable systems.
• Masses of data often need to be captured, like in our museum collection or city modeling
examples. Efficient data capture and model building is essential if this is to be practical.
• Those undertaking the digitisation may or may not be technically trained. Not all applica-
tions are to be found in industry, and technically trained personnel may very well not be


 我的内容管理
展开
我的内容管理
展开







