μCOS-Ⅱ系统智能寻迹模型车:设计与实现
199 浏览量
更新于2024-09-01
1
收藏 477KB PDF 举报
"1.2电源管理模块
电源管理模块是整个系统稳定运行的基础。为了减少电机和其他大功率器件对微控制器系统的干扰,通常会采用独立的电源供应各个模块。在本设计中,12V蓄电池用于直接驱动直流电机,提供必要的动力。同时,通过降压和稳压电路,将12V电压转化为微控制器和其他芯片所需的稳定工作电压,如5V或3.3V。这样的设计可以确保μCOS-Ⅱ系统以及其他敏感电子元件在运行过程中不会受到电压波动的影响,提高了系统的可靠性和稳定性。
1.3路径识别模块
路径识别模块是智能寻迹的关键,采用了红外光电传感器阵列。这些传感器安装在模型车前部,能够检测地面的颜色变化,从而识别出黑色轨迹线。当传感器接收到地面反射回来的不同强度的红外光时,单片机会根据接收到的信号强度来判断小车的当前位置和方向,进而调整行驶路径。
1.4转向控制模块
转向控制模块通常由伺服电机或步进电机实现,负责根据路径识别模块的反馈信息精确调整车轮的角度。在本设计中,μCOS-Ⅱ系统通过PWM(脉宽调制)技术控制伺服电机,实现对转向的精确控制,确保模型车能沿着设定的轨迹线行驶。
1.5电机驱动模块
电机驱动模块是智能车动力系统的核心,它负责接收单片机发出的指令,控制直流电机的转速和方向。在本设计中,使用H桥电路来驱动直流电机,通过改变输入信号的极性实现电机的正反转,同时通过调整PWM信号的占空比来调节电机的速度,从而实现模型车的加速、减速和停止。
1.6速度及路程检测模块
速度检测通常通过光电编码器或者磁性编码器实现,通过检测电机转动的脉冲数量来计算车速。在本设计中,后轮上的黑白条纹配合光电传感器可以实现这一功能。这种速度检测方法不仅可以实时监测车速,还可以估算行驶距离,为路径规划和控制算法提供关键数据。
2软件系统的设计
μCOS-Ⅱ是一个可移植的、占先式的实时操作系统,它为任务调度、内存管理和中断处理提供了强大的支持。在智能寻迹模型车中,μCOS-Ⅱ系统被用来管理多个并发任务,包括路径识别、电机控制、速度检测等。每个任务都有明确的优先级,当高优先级任务就绪时,μCOS-Ⅱ会立即切换到该任务,保证了系统的快速响应。
3系统测试与优化
在完成硬件和软件设计后,进行了一系列的系统测试,包括静态和动态测试。静态测试主要是验证各个模块的独立功能,而动态测试则模拟实际环境中的寻迹和避障情况,验证整个系统的协同工作能力。通过反复测试和优化,模型车在寻迹精度、反应速度以及稳定性方面都达到了预期效果。
4结论
基于μCOS-Ⅱ的智能寻迹模型车成功实现了高效稳定的追踪功能,具有高性能和低功耗的特点。这种设计不仅适用于电子竞赛,还为智能交通、自动化物流等领域提供了有价值的参考。随着技术的进一步发展,未来智能车将会在更多方面展现出更强大的性能和更广泛的应用场景。"
基于基于μCOS-Ⅱ系统的智能寻迹模型车的设计与实现系统的智能寻迹模型车的设计与实现
本文介绍了一种智能寻迹模型车的设计与实现。实践证明,该智能车定位准确,系统响应快且稳定,具备良好
的动力性能和精确的转向性能,证明了μC/OS-Ⅱ系统的有效性和稳定性。相比同类智能车,该模型车还具有高
性能、低功耗的优点。
0 引 言
智能车辆是当今车辆工程领域研究的前沿,它体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉
和综合,是未来汽车发展的趋势。以往智能小车在软件设计上多采用单程序控制,不利于智能车在外部环境改变时做出快速反
应,为使智能车系统反应更为快速,该智能车应用μC/OS-Ⅱ系统,该系统适合小型控制系统,具有执行效率高、占用空间
小、实时性能优良等特点。且选用功耗较低、资源更为丰富的AVR系列ATmega16单片机作为核心控制单元。
采用红外探测法实现寻迹功能,即将红外光电传感器固定在底盘前沿,利用其在不同颜色的物体表面具有不同的反射性质的特
点,在小车行驶过程中不断地向地面发射红外光,单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走
路线。并在后轮上粘上均匀分布的黑白条纹,根据光电反射原理,测量车速。为保证智能车在行驶过程具有良好的操稳性和平
顺性,控制系统对直流电机驱动控制提出了较为理想的解决方案。
1 硬件系统的设计及实现
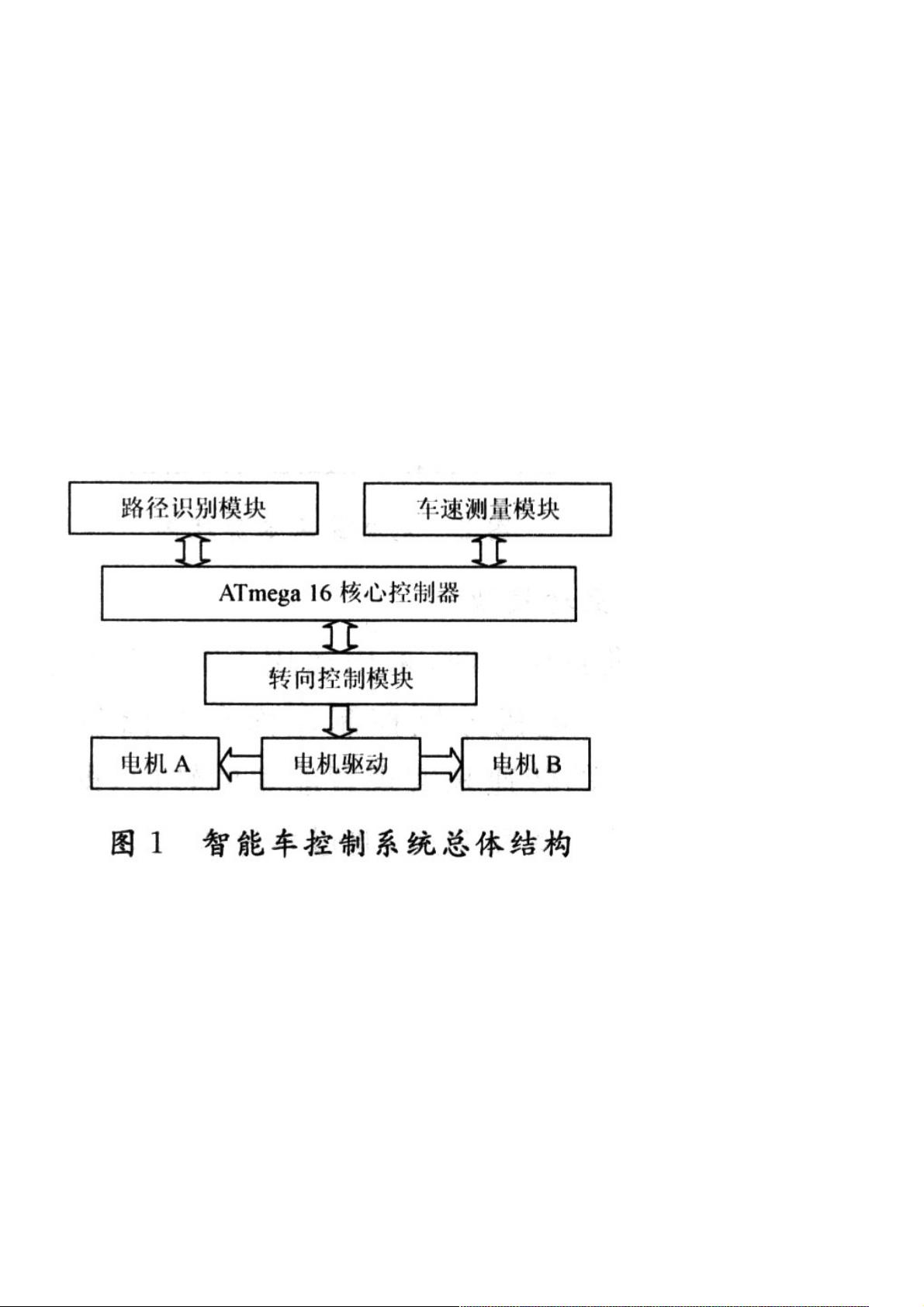
智能车的硬件部分以AVR系列ATmega 16单片机为核心控制器,由核心控制单元、电源管理模块、路径识别模块、转向控制
模块、电机驱动模块和速度及路程检测模块等组成。智能车控制系统总体结构如图1所示。
1.1 核心控制单元
智能车采用ATmage 16型单片机作为主控CPU其主要特点为高性能、低功耗、高性价比,资源丰富,并且支持高级语言编
程,在运行速度。内存容量,内部功能模块集成化等诸多方面比MCS-51系列先进。在智能车系统设计中,单片机的I/O资源
分配如下:PB3,PD7为伺服电动机的PWM控制信号输出引脚;PD0~PD3为驱动电机正反转引脚;路径识别系统经排线由
PA0~PA6输入至单片机。
1.2 电源管理模块
为避免电机等器件对系统产生干扰,智能车的各功能模块单独供电。采用12 V蓄电池为直流电机供电,将12 V电压降压、稳
压后给单片机系统和其他芯片供电。相对于其他类型的电源,蓄电池具有较强的电流驱动能力以及稳定的电压输出性能。考虑
到蓄电池的体积大,在车体设计时留出了足够的空间。
在稳压时,采用两片7812芯片将电压稳压至12 V后给直流电机供电,然后采用2576将电压稳至5 V。2576的输出电流最大可
到3 A,完全满足系统要求。
1.3 路径识别模块
智能车采用红外探测法实现小车在黑色地板上循白线行走,为了提高控制精度,要求传感器排列紧密,越近越好。但传感器排
列紧密,传感器发射管的光线可能会从地面反射进入临近传感器的接收管。为消除传感器之间互相干扰,传感器共分为7组,
由PA0~PA6这7个I/O口直接供MCU读取传感器数据。利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在智
能车行驶过程中传感器不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接
下载后可阅读完整内容,剩余3页未读,立即下载
2020-11-09 上传
2020-01-19 上传
206 浏览量
2020-01-19 上传
2024-09-17 上传
2022-06-30 上传
2022-07-01 上传
2022-06-30 上传
2019-08-15 上传

weixin_38623080
- 粉丝: 5
- 资源: 1002
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
