MPU6050陀螺仪在智能汽车竞赛中的应用
需积分: 13 126 浏览量
更新于2024-07-25
收藏 4.5MB PDF 举报
"mpu6050陀螺仪在智能汽车竞赛中的应用"
MPU6050是一款集成六轴传感器的微处理器单元,包含3轴陀螺仪和3轴加速度计,常用于嵌入式系统,如智能汽车、机器人等领域的姿态控制和运动追踪。该陀螺仪官网提供的参考方案第二版为使用MPU6050的用户提供了详尽的设计指导。
在智能汽车竞赛中,MPU6050陀螺仪是实现精确平衡控制、速度控制和方向控制的关键部件。方案详细阐述了如何利用陀螺仪的数据来测量车模的角度和角速度,从而确保车辆在行驶过程中保持直立状态。
首先,直立行走任务分解中提到,车模的稳定主要依赖于对车模角度的实时监测和调整。2.3节中,车模角度和角速度的测量是通过MPU6050的陀螺仪功能实现的,它能提供关于车辆旋转速率的信息,这些数据对于动态控制至关重要。2.4节则讨论了速度控制,通过对电机输出的调节,实现车模速度的精准控制。
方向控制(2.6节)部分,陀螺仪的数据用于确定车模的转向,结合加速度计的数据,可以实现对车辆姿态的全方位掌握。车模直立行走控制算法总图展示了整个控制系统的工作流程。
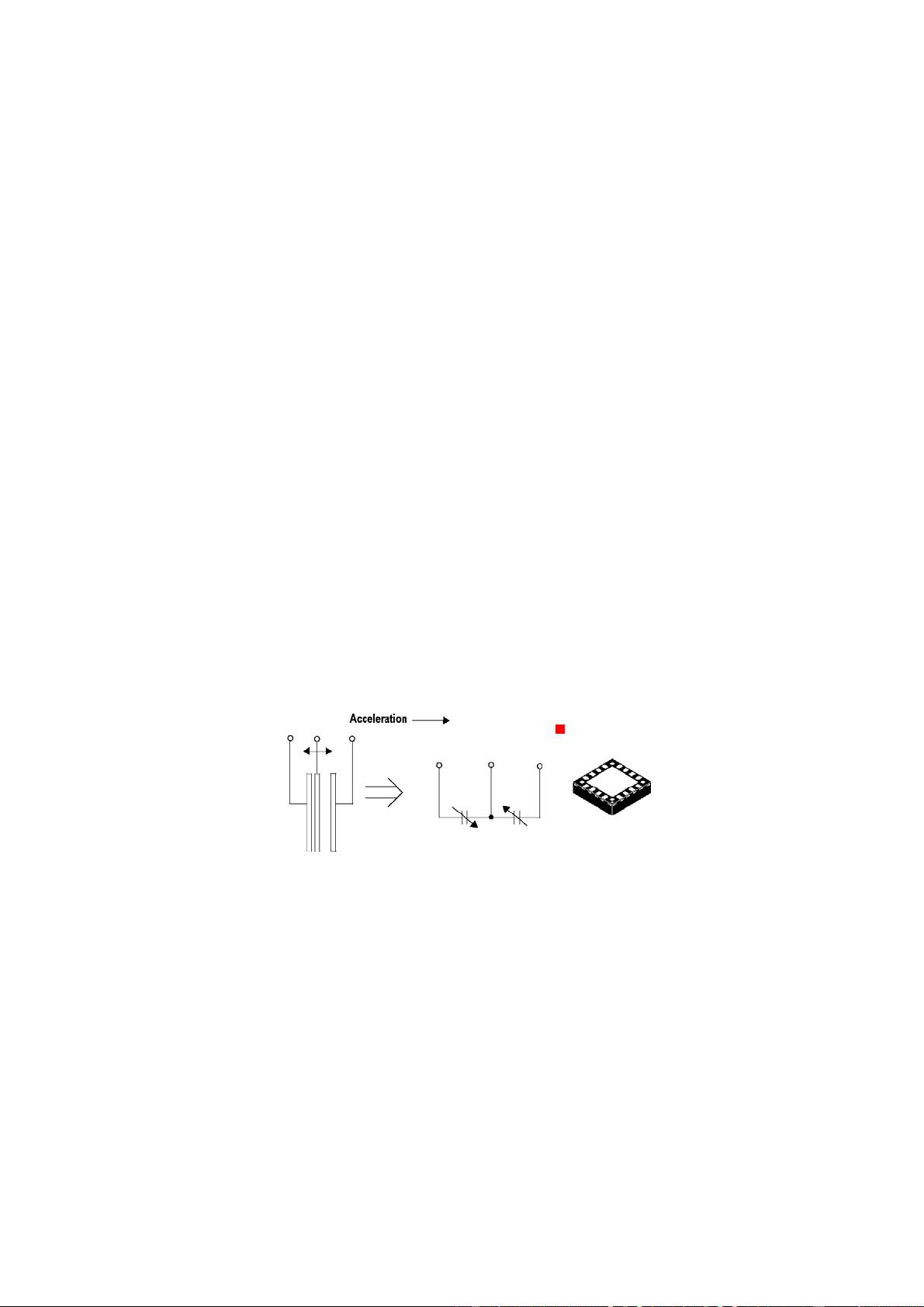
电路设计篇中,3.3节倾角传感器电路部分提到了MPU6050的应用,它作为倾角测量的核心部件,与其他电路如DSC(数字信号控制器)、电机驱动电路、速度传感器电路等共同协作,确保车模的稳定运行。
软件开发篇5.2节,DSC的硬件资源配置说明了如何配置MPU6050的通信接口和数据处理,以高效地获取和处理陀螺仪的数据。5.3节主要算法及其实现,详细介绍了如何编写控制算法,将陀螺仪的原始数据转化为实际的控制指令。
在车模调试篇,6.1至6.5节,调试参数和条件的选择,以及静态和动态参数的调试过程,都离不开MPU6050提供的准确传感器数据。方案中还提出了方案改进和整体性能提升的方法,强调了MPU6050陀螺仪在车模控制中的核心地位。
MPU6050陀螺仪在智能汽车竞赛中发挥着至关重要的作用,通过精确测量和控制,保证车模在复杂环境下的稳定行驶。这份官方参考方案为开发者提供了理论依据和实践指导,有助于提高智能汽车的性能和竞争力。
k
1
k
2
适当的类比和想
象,可以使我们
更容易理解控制
原理。
图 2‐10 车模控制两个系数作用
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
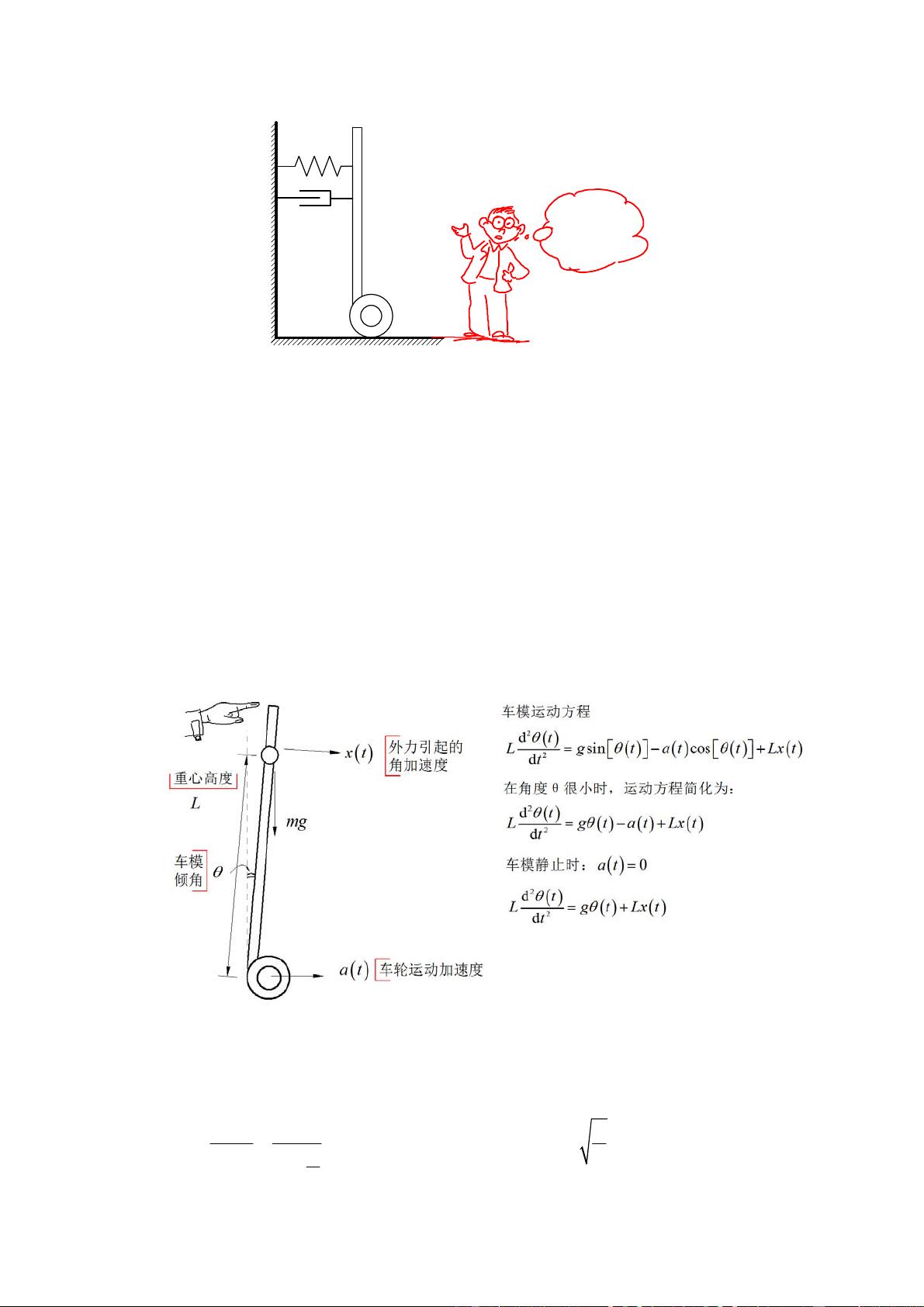
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆,它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度 ()
x
t 。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度()at ()
x
t 之间的运动方
程。如图 2-11 所示。
图 2‐11 车模运动方程
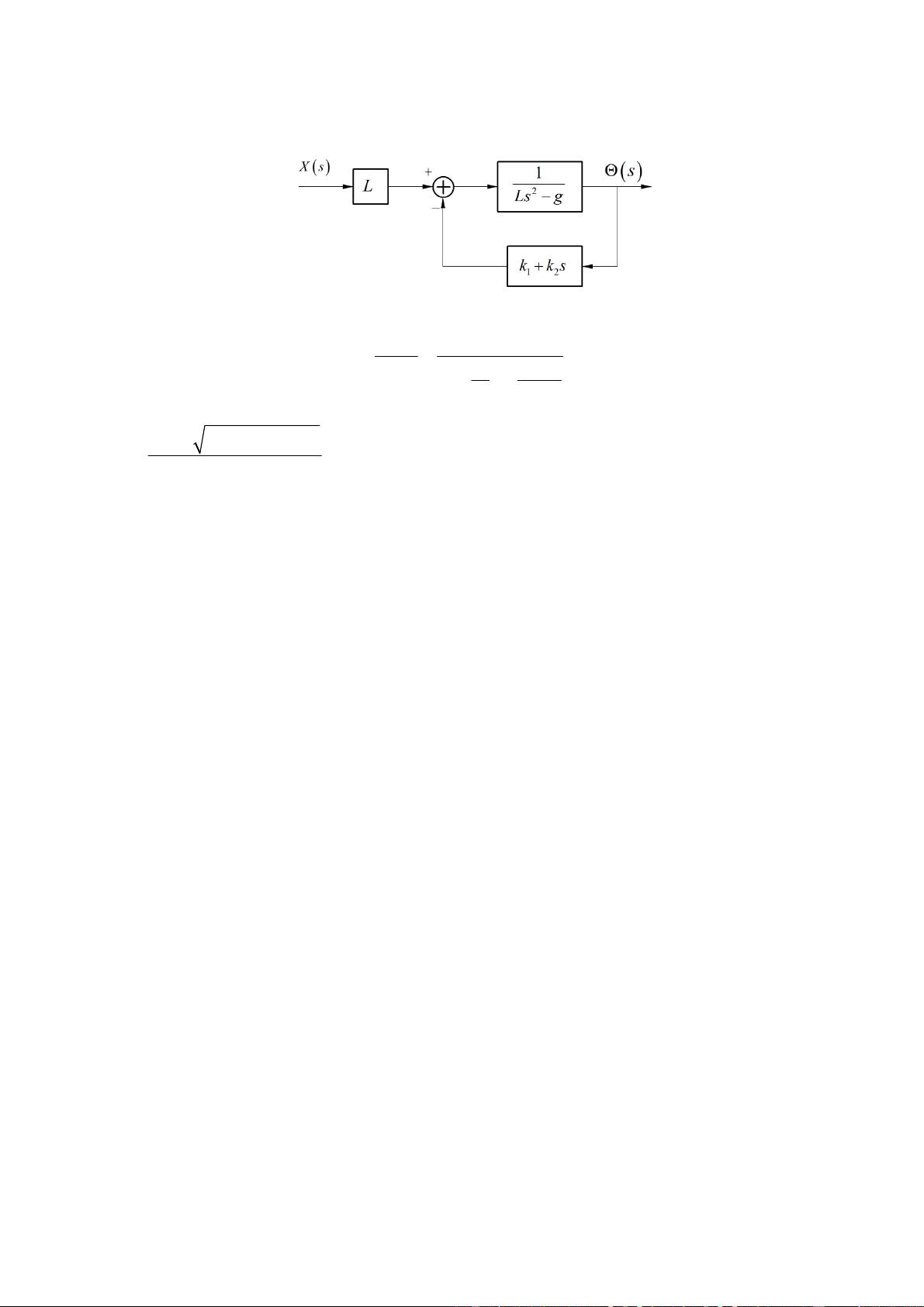
对应车模静止时,系统输入输出的传递函数为:
()
()
()
2
1
s
Hs
g
Xs
s
L
Θ
==
−
,此时系统具有两个极点
p
g
s
L
=±
。一个极点位于 s 平面的
16
剩余107页未读,继续阅读
2025-02-17 上传
2025-02-17 上传
2025-02-17 上传
2025-02-17 上传
2025-02-17 上传
基于Matlab Simulink的火电自抗扰调频与群智能算法智能调频技术研究,基于Matlab Simulink的火电自抗扰调频与群智能算法智能调频技术研究,火电一次调频,自抗扰调频,群智能算法智能
2025-02-17 上传
2025-02-17 上传

jhuishou
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- LG手机系统升级与修复指南
- Reflexil插件:Red Gate Reflector的IL代码操作工具
- uniapp开发的班级打卡系统微信小程序完整源码
- Snort 2.8.3版本安装包:完善的入侵防御检测工具
- 香港iPhone开售监察非官方浏览器插件发布
- HTML编码挑战:100天成就编程专家
- VC++2010express:初学者至进阶者的C++编译器
- QQ挂机程序:优化用户体验与管理
- 易语言实现无限行列Excel导入导出方法
- 搞笑片客App:上传生活的欢笑与不快
- 高效实用的屏幕吸色工具使用体验
- FileSplitter:高效文件切割与合并工具
- Telefum24-crx插件:扩展程序实现电话通知功能
- 深入分析protobuf-2.5.0源码包特性
- 海康DS-78/79N-EX系列萤石云程序包升级指南
- 自定义鼠标右键菜单实现与jQuery代码示例
