PID控制在单级倒立摆系统分析与MATLAB仿真
需积分: 10 188 浏览量
更新于2024-09-15
收藏 489KB DOC 举报
"PID在倒立摆中的应用,通过数学建模和MATLAB仿真来探讨PID控制器在单级倒立摆系统中的应用"
在控制工程领域,PID(比例-积分-微分)控制器因其简单易用和高效性能而被广泛应用。在倒立摆系统中,PID控制显得尤为重要,因为倒立摆是一种典型的非线性、多变量和强耦合系统,它需要精确且快速的控制来维持其动态平衡。
倒立摆,正如其名,是一个在不稳定状态下保持平衡的系统,通常由一个小车和一个摆杆组成。在没有外部控制的情况下,任何微小的扰动都会导致摆杆偏离垂直位置。因此,通过PID控制器提供的实时调整力,可以使得摆杆的角度尽可能接近零,从而使整个系统保持稳定。
首先,建立倒立摆的数学模型是控制设计的基础。这涉及到应用牛顿力学和运动学原理,通过动力学方程来描述系统的动态行为。在单级倒立摆的案例中,系统被简化为二维模型,考虑摆杆长度、摆球和小车的质量等因素。通过线性化处理动力学方程,可以得到系统的传递函数,这是进行控制器设计的关键步骤。
接下来,利用MATLAB这一强大的数学工具,可以进行PID控制的仿真。在MATLAB环境下,可以构建基于PID的闭环控制系统模型,通过仿真来观察系统的阶跃响应。阶跃响应反映了系统对输入信号的瞬态和稳态行为,对于评估控制效果至关重要。
PID控制器的三个组成部分——比例(P)、积分(I)和微分(D)项,分别对应于系统的响应速度、消除静差和抑制超调。在倒立摆的控制中,比例项提供快速的响应,积分项用于消除误差,而微分项则有助于减少系统的振荡。通过调整PID参数,可以优化控制性能,如提高稳定性和响应速度,同时抑制不必要的振荡。
在实际应用中,单级倒立摆的PID控制展示了其在保持动态平衡方面的优势,但同时也暴露出一些不足,例如参数整定的困难、系统鲁棒性的挑战以及对初始条件和扰动的敏感性。这些挑战促使研究人员不断探索更高级别的倒立摆系统,如一级、二级、三级和四级倒立摆,并采用更先进的控制策略,如状态反馈控制,以提升系统的稳定性和适应性。
总结来说,PID控制在倒立摆中的应用展示了控制理论在解决复杂动态问题上的实用性。通过对倒立摆的数学建模和MATLAB仿真,我们可以深入理解PID控制器的工作原理,并通过调整和优化控制器参数,实现对倒立摆的精确控制,这在理论研究和实际应用中都具有重要意义。
PID 控制在单级倒立摆系统中的分析与应用
摘要:作为现代控制理论在空间技术中的应用典范,倒立摆系统一直广受青睐。随着技术
进步,一级、二级、三级、四级倒立摆系列相继问世。倒立摆系统实属多变量、非线性、
强耦合系统。本文首先基于牛顿力学与运动学知识建立其数学模型—动力学方程,并经过
线性化处理得到其传递函数模型。其次在 MATLAB 环境中进行了 PID 控制下的仿真。最后
由仿真结果指出了单级倒立摆系统的在应用中的优势与缺憾。
关键字:单级倒立摆;PID 控制;MATLAB;
一、引言
本质上,倒立摆是一个非线性自然不稳定系统。倒立摆是处于倒置不稳定状态,人为
控制使其处于动态平衡的一种摆。常见的倒立摆系统一般由小车和摆杆两部分构成,在复
杂的倒立摆系统中,摆杆长度和质量均可变化。在现代控制理论教学中,倒立摆系统一直
是一个理想的实验平台。尤其是在如控制系统的稳定性、可控性、系统收敛性和系统抗干
扰性等抽象的概念讲解中,都可以通过倒立摆系统形象的表现出来。作为控制领域研究的
热点。近年来,国际上对倒立摆的研究的热情丝毫未减,在单级倒立摆的基础之上很多研
究技术与手段已经实现了对一级、二级、三级甚至四级倒立摆的控制,如 PID 控制,状态
反馈控制等。本文中,主要以单级倒立摆为控制对象,运用牛顿动力学方法为其建立数学
模型,并由此在 MATLAB 中建立基于 PID 校正的单级倒立摆闭环系统框图,研究并分析其
阶跃响应结果。
二、单级倒立摆的数学模型
2.1 系统运动方程
因为倒立摆是一个复杂、多变量、存在严重非线性、非自治不稳定系统。在没有外界
强加的控制力作用下,摆球将在任何微小的扰动作用下,偏离竖直方向的平衡位置向任何
方向倾倒。所以为了达到对系统控制的目的,外界需提供一个力,使得摆杆与竖直方向的
夹角保持接近于零,即摆杆能尽量处于平衡处,单级倒立摆能处于稳定状态。研究系统都
是从数学模型开始的,而数学模型的建立需对物理环境进行抽象与对物理条件进行理想化。
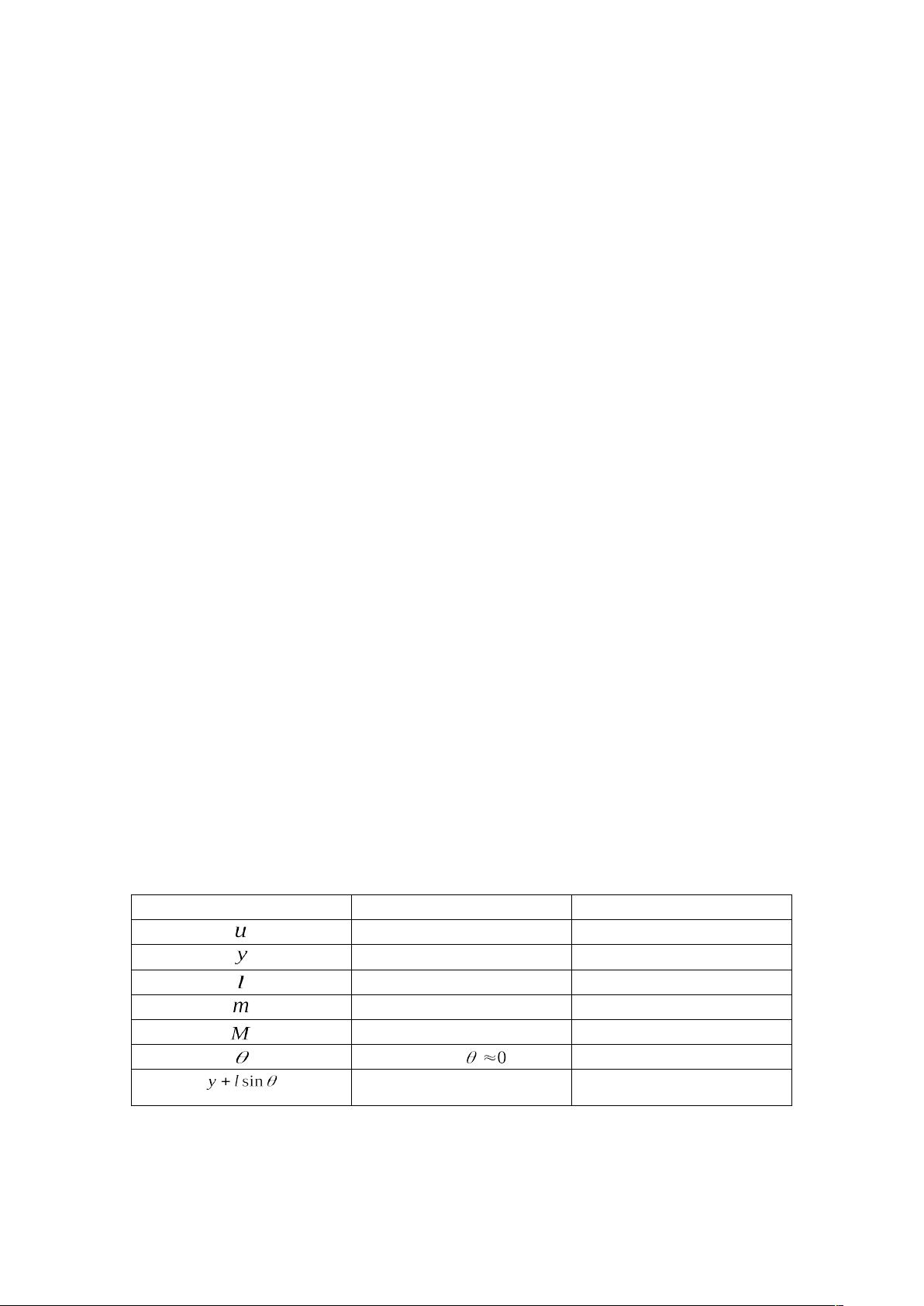
将小车的物理环境进行二维理想化之后,如下示意图所示,将系统状态参数统计于下表:
表 1 单级倒立摆状态参数
物理表达式 数值 物理意义
可变量 外界作用力
可变量 小车瞬时位置
1m
摆杆长
0.1kg
摆球质量
1kg
小车质量
可变量( ) 摆杆与竖直方向夹角
可变量 摆球瞬时位置
在理想情况下(忽略杆子质量,驱动电机本身动力学特性及各种摩擦和风力的影响)
下载后可阅读完整内容,剩余4页未读,立即下载
2019-01-05 上传
2013-01-02 上传
2022-09-19 上传
2022-09-20 上传
2022-09-24 上传
2022-09-24 上传
2022-07-14 上传
2022-07-14 上传
2022-09-20 上传

zhju20090902
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 阴阳师超级放大镜 yys.7z
- Algorithms
- 个人网站:我的个人网站
- ggviral
- windows_tool:Windows平台上的一些有用工具
- MetagenomeScope:用于(元)基因组装配图的Web可视化工具
- newshub:使用Django的多功能News Aggregator网络应用程序
- 佐伊·比尔斯
- 2021 Java面试题.rar
- PM2.5:练手项目,调用http
- TranslationTCPLab4
- privateWeb:私人网站
- 专案
- Container-Gardening-Site
- Python库 | getsong-2.0.0-py3.5.egg
- package-booking-frontend
