STM32F10xxx正交编码器:Cortex-M3 MCU实现无压降电机伺服控制
STM32F10xxx正交编码器是一种在电机伺服控制领域广泛应用的传感器,它将线性位移转化为脉冲信号,通过监控脉冲数量和两个信号的相对相位,用户能够精确地跟踪位置、旋转方向和速度。这种编码器通常包含两个通道,即增量通道,用于提供连续的脉冲信号,以及一个额外的第三通道(或索引通道),可以在特定位置时重置位置计数器,使得系统能够准确地初始化和定位。
STM32F10xxx系列微控制器基于ARM Cortex-M3内核,集成有专用的正交编码器接口,这使得处理编码器信号成为可能,无需占用过多的CPU资源。这意味着微处理器可以专注于高级矢量控制算法,提高系统的实时性和效率。STM32F10x系列提供了丰富的外设功能,如定时器、中断系统等,便于与编码器通信和数据处理。
在编程上,STM32F10x微控制器通常通过中断服务函数(ISR)来捕获编码器的脉冲事件,根据信号的相位关系解码出位移和方向信息。开发人员可以利用STM32提供的驱动库或者自定义函数来配置和管理编码器接口,确保数据采集的准确性。
具体实现时,可能涉及以下几个步骤:
1. 初始化编码器接口,设置合适的时钟分频系数和中断优先级。
2. 配置中断处理程序,当编码器产生新的脉冲时被触发。
3. 在中断服务函数中,解析脉冲信号,更新位置计数器,并处理方向变化。
4. 如果使用索引信号,根据其状态调整计数器,确保位置的准确性。
5. 通过串行或并行接口将编码器数据传输到微控制器内部,进行进一步的处理和控制决策。
STM32F10xxx微控制器凭借其强大的处理能力和集成的正交编码器接口,为电机伺服系统提供了一个高效、精准的位置跟踪解决方案。对于那些希望在电机控制应用中使用此类编码器的开发者来说,理解并熟练运用STM32F10x的相关功能和技术是至关重要的。
STM32F10xxx
STM32F10xxx
Abstract --- The quadrature encoder which is very popular in the motor servo control
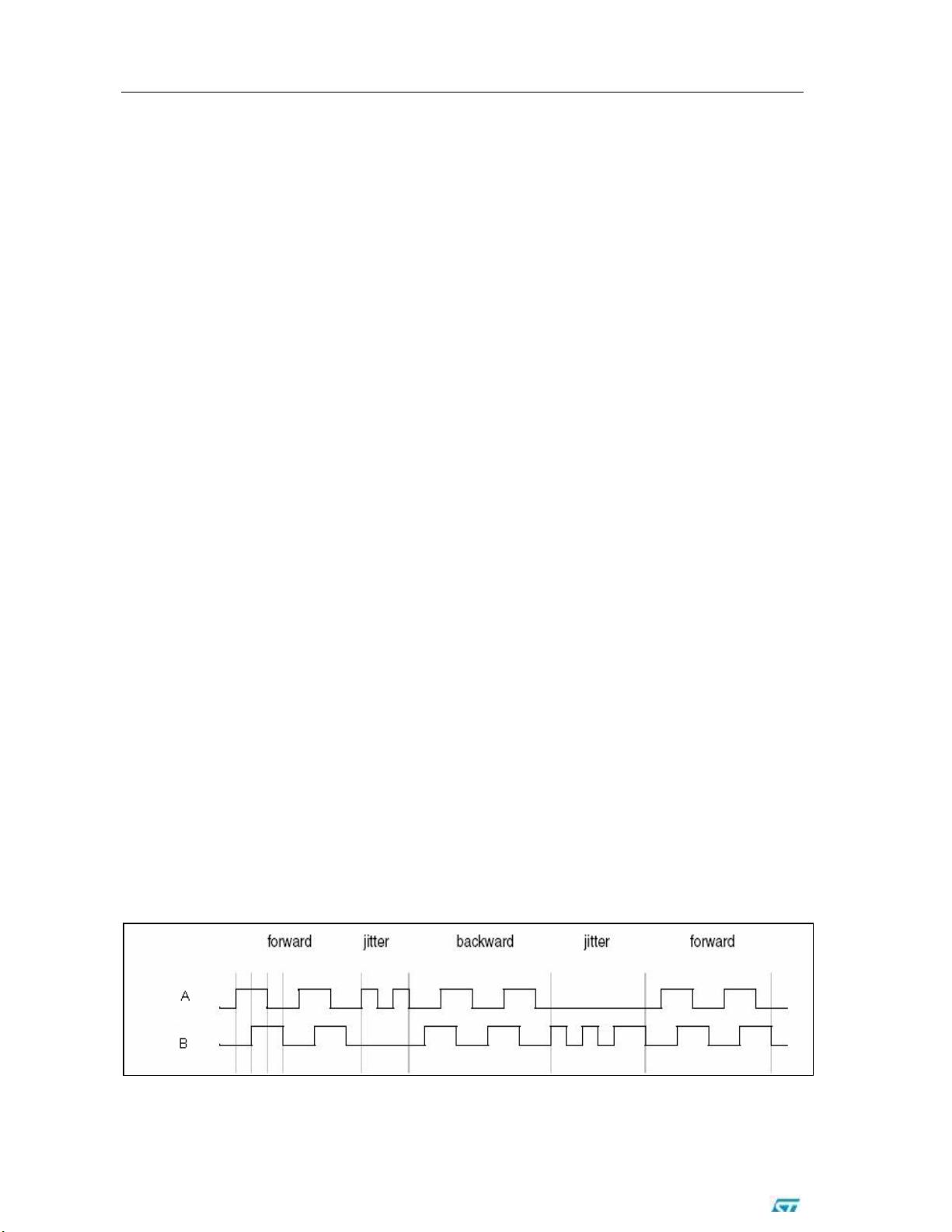
application, known as a 2-channel incremental encoder, converts linear displacement
into a pulse signal. By monitoring the number of pulses and the relative phase of the
two signals you can track the position, the direction of rotation and speed. In ddition,
a third channel, or index signal, can be used to reset the position counter.
STM3210x which is the MCU based on ARM latest core - Cortex-M3, integrates the
quadrature encoder interface. Accordingly STM3210x can handles the encoder
signal without any CPU overhead which it is possible for CPU to focus on the vector
control.
, TM32F10x
MCU MCU
STM32F10x
1
ABZ
A B+/- 90°
1
1/7
下载后可阅读完整内容,剩余7页未读,立即下载
点击了解资源详情
568 浏览量
点击了解资源详情
228 浏览量
2022-09-20 上传
2022-09-21 上传
2022-09-20 上传
2022-09-21 上传

minihant
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 屏幕截图(iPhone源代码)
- App-PAUSE-TimeMachine
- EnvironmentSwitcher::fire:No repackage, switch environment with one click.(无需重新打包,一键切换环境 )
- 加减乘除在线网页计算器js代码
- JsBridge:android java和javascript桥,灵感来自微信webview jsbridge
- Makefile手册.zip
- OCGumbo(iPhone源代码)
- Tools for iNaturalist-crx插件
- HackTheBox-CTF-Writeups:此备忘单旨在面向CTF玩家和初学者,以帮助他们根据操作系统和难度对Hack The Box Labs进行分类
- HTML5预期年化收益圆形进度条动画代码
- CSE460
- RACDemo:ReactiveCocoa 演示
- JsonLocalize:JsonLocalize可以帮助您轻松轻松地对项目进行本地化!
- HTML5仿超级玛丽网页js小游戏
- blurhash:图像占位符的非常紧凑的表示形式
- SLGSlideShowView(iPhone源代码)
