STM32F4驱动MPU6050六轴传感器教程
需积分: 9 103 浏览量
更新于2024-07-20
收藏 1.71MB PDF 举报
"该资源是一份关于STM32F4开发的教程,专注于使用ALIENTEK探索者STM32F407开发板驱动MPU6050六轴传感器的实验。教程详细介绍了MPU6050的基础知识、硬件设计、软件设计以及下载验证的步骤。内容涵盖MPU6050的功能、特性以及如何利用其内置的DMP进行姿态解算。"
MPU6050是一款由InvenSense公司制造的六轴运动处理组件,集成了3轴陀螺仪和3轴加速度传感器。这款传感器在多个领域如四轴飞行器、平衡车和空中鼠标设计中广泛应用。它的一大优点在于整合了所有传感器,避免了多组件方案中的轴间差异问题,节省了安装空间。
MPU6050包含一个额外的IIC接口,可用于连接外部磁力传感器,以实现9轴数据融合。它的核心亮点是内置的数字运动处理器(DMP),这个硬件加速引擎能够处理复杂的运动数据,输出旋转矩阵、四元数和欧拉角格式的融合演算数据。DMP减轻了主控微控制器(MCU)的计算负担,简化了姿态解算的过程,降低了开发难度。
MPU6050的陀螺仪部分具有多种感测范围,从±250到±2000°/sec,而加速度传感器则可程序控制,范围从±2g到±16g。这些特性使得MPU6050能够在各种应用场景中提供精确的数据。此外,它还具有消除轴间敏感度和减少漂移的优点,提高了传感器的稳定性和准确性。
在硬件设计部分,教程将指导用户如何正确连接和配置MPU6050,以便与STM32F4开发板协同工作。软件设计部分则会讲解如何编写代码来驱动传感器,读取原始数据,并利用DMP进行姿态解算。下载验证部分将说明如何将程序烧录到开发板并测试传感器的功能。
这份资源是学习如何使用STM32F4和MPU6050进行运动检测和姿态解算的理想教程,对于物联网、机器人和无人机等领域的开发者尤其有价值。通过实践教程中的步骤,开发者可以深入了解MPU6050的性能和潜力,提升自己的嵌入式系统开发能力。
STM32F4 开发指南(库函数版)
ALIENTEK 探索者 STM32F407 开发板教程
481
000
内部 8M RC 晶振
001
PLL,使用 X 轴陀螺作为参考
010
PLL,使用 Y 轴陀螺作为参考
011
PLL,使用 Z 轴陀螺作为参考
100
PLL,使用外部 32.768Khz 作为参考
101
PLL,使用外部 19.2Mhz 作为参考
110
保留
111
关闭时钟,保持时序产生电路复位状态
图 37.1.1.1 CLKSEL 选择列表
默认是使用内部 8M RC 晶振的,精度不高,所以我们一般选择 X/Y/Z 轴陀螺作为参考的
PLL 作为时钟源,一般设置 CLKSEL=001 即可。
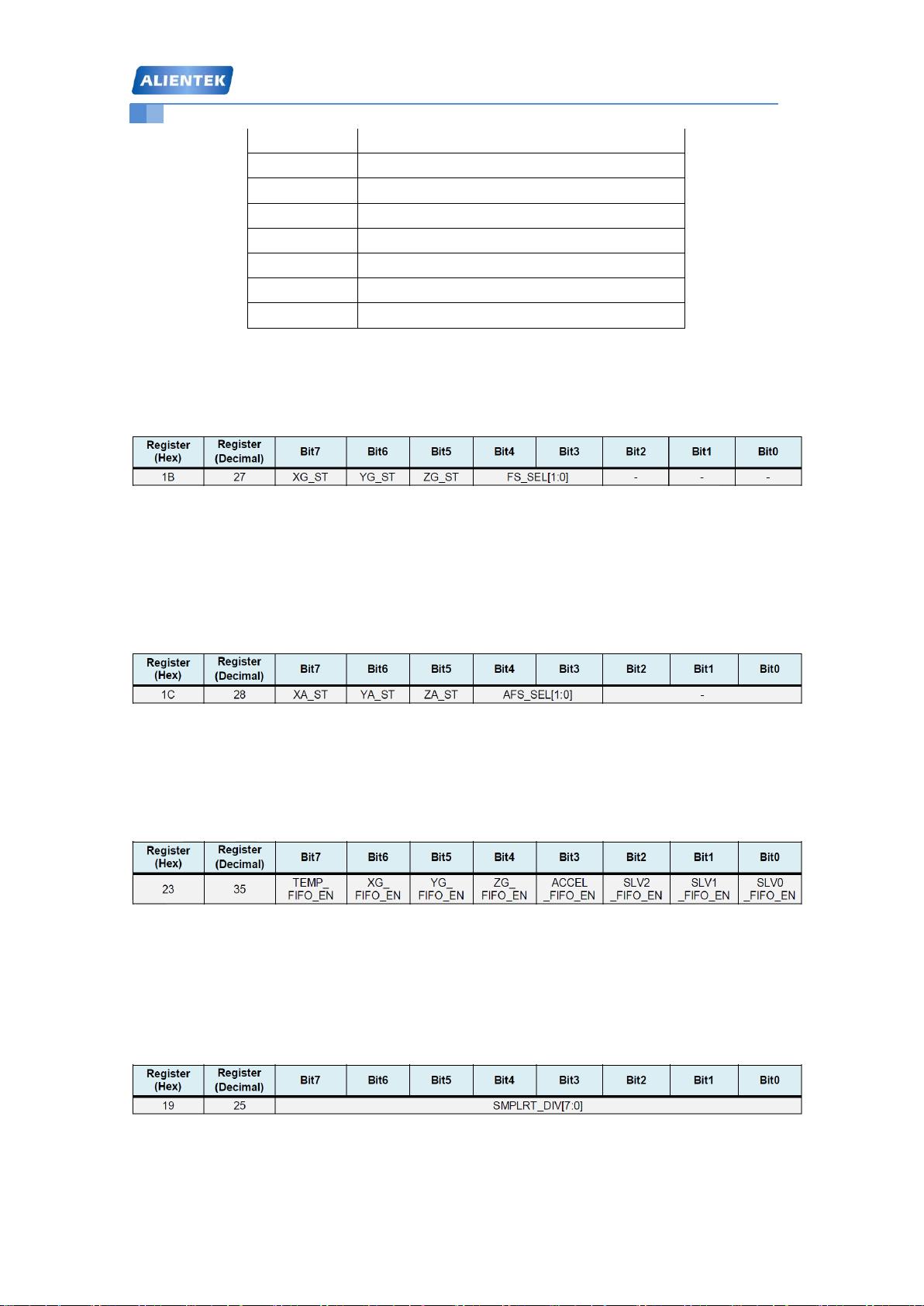
接着,我们看陀螺仪配置寄存器,该寄存器地址为:0X1B,各位描述如图 37.1.4 所示:
图 37.1.1.4 陀螺仪配置寄存器各位描述
该寄存器我们只关心 FS_SEL[1:0]这两个位,用于设置陀螺仪的满量程范围:0,± 250°/S;
1,±500°/S;2,±1000°/S;3,±2000°/S;我们一般设置为 3,即±2000°/S,因为陀螺
仪的 ADC 为 16 位分辨率,所以得到灵敏度为:65536/4000=16.4LSB/(°/S)。
接下来,我们看加速度传感器配置寄存器,寄存器地址为:0X1C,各位描述如图 37.1.1.5
所示:
图 37.1.1.5 加速度传感器配置寄存器各位描述
该寄存器我们只关心 AFS_SEL[1:0]这两个位,用于设置加速度传感器的满量程范围:0,
±2g;1,±4g;2,±8g;3,±16g;我们一般设置为 0,即±2g,因为加速度传感器的 ADC
也是 16 位,所以得到灵敏度为:65536/4=16384LSB/g。
接下来,我看看 FIFO 使能寄存器,寄存器地址为:0X1C,各位描述如图 37.1.1.6 所示:
图 37.1.1.6 FIFO 使能寄存器各位描述
该寄存器用于控制 FIFO 使能,在简单读取传感器数据的时候,可以不用 FIFO,设置对应
位为 0 即可禁止 FIFO,设置为 1,则使能 FIFO。注意加速度传感器的 3 个轴,全由 1 个位
(ACCEL_FIFO_EN)控制,只要该位置 1,则加速度传感器的三个通道都开启 FIFO 了。
接下来,我们看陀螺仪采样率分频寄存器,寄存器地址为:0X19,各位描述如图 37.1.1.7
所示:
图 37.1.1.7 陀螺仪采样率分频寄存器各位描述
该寄存器用于设置 MPU6050 的陀螺仪采样频率,计算公式为:
剩余17页未读,继续阅读
2009-09-03 上传
2022-04-29 上传
2021-09-30 上传
2023-05-17 上传
2024-04-26 上传
2023-05-13 上传
2023-05-31 上传
2023-07-10 上传
2023-04-05 上传


嵌入式Linux,
- 粉丝: 1w+
- 资源: 28
 我的内容管理
展开
我的内容管理
展开







最新资源
- 近探拓客软件-实现日更新的全国工商数据采集的工具-工商数据采集工具免费下载V21.4.1
- telescope_hoogle:望远镜的Hoogle搜索集成
- passwordGenerator:此分配使用math.random为用户生成密码
- dotnet C# 根据椭圆长度和宽度和旋转角计算出椭圆中心点的方法.rar
- ProjectManager:.NET Core中的简单项目管理
- Muzisung_FE:这是无知项目前端的存储库。
- Mysis_DVM_Modeling:我的高级论文项目“为 Diluviana 的 Diel 垂直迁移模式建模”的代码和头脑风暴。
- torch_spline_conv-1.2.1-cp36-cp36m-linux_x86_64whl.zip
- CMTraerPhysics:Traer v3.0物理引擎的Objective-CCocoa端口; 与iOS演示应用程序
- bilingual-pdf:由英文PDF生成双语PDF,回归原生加速长篇英文阅读!
- js-demo:关于本人博客中关于js的使用的代码示例
- 清水混凝土模板支撑施工方案.zip
- 来自“菜鸟教程”JavaScript实例练习【二】web.zip
- 仿天猫静态页面 登陆/注册/首页/天猫超市页/购物车/手机列表页 Tmall.zip
- 淘特新闻管理系统 v4.0.4
- Class-33
