STM32驱动的工业智能灭火机器人:硬件与软件设计详解
77 浏览量
更新于2024-09-01
1
收藏 184KB PDF 举报
本文主要探讨了工业电子领域中一款基于STM32F103嵌入式芯片的智能灭火机器人设计。设计灵感源于一场灭火机器人比赛,比赛场地设定为国际标准,具有明确的物理特征,如33厘米高的木质墙壁、46厘米宽的走廊和4.5厘米宽的白色标记等,用于指示房间入口和火源位置。机器人被要求在模拟的四室一厅环境中执行任务,包括寻找火源、确认、灭火以及返回起始位置。
该机器人采用STM32F103作为核心处理器,集成红外测距传感器用于避障和沿墙壁导航。硬件设计包括STM32F103、传感器模块(如火焰传感器和灰度传感器)、直流电机驱动模块,以及风扇模块,这些组件协同工作以实现机器人的移动、定位和灭火功能。例如,通过红外传感器获取周围环境信息,火焰传感器用来检测火源,而灰度传感器则帮助机器人识别白线,确定是否接近火源。当检测到火源时,机器人会调整方向,启动风扇进行灭火,并在灭火后返回起始点H。
系统硬件设计部分详细阐述了各模块的功能和集成,强调了整体布局的灵活性,如使用万向轮以便机器人灵活调整运动方向。同时,文章也关注了电源管理,确保系统的稳定运行。整个设计体现了工业电子技术与智能控制的结合,展示了在实际应用场景中的创新性和实用性。
总结来说,这篇文章深入研究了如何利用STM32F103构建一个具备高级感知和执行能力的灭火机器人,不仅涵盖了硬件设计的各个环节,还涉及了软件算法的设计,以实现对复杂环境的适应和高效灭火任务的完成。这是一项融合了硬件工程、传感器技术、控制理论以及嵌入式系统知识的重要工业电子项目。
工业电子中的一款基于工业电子中的一款基于STM32的智能灭火机器人设计的智能灭火机器人设计
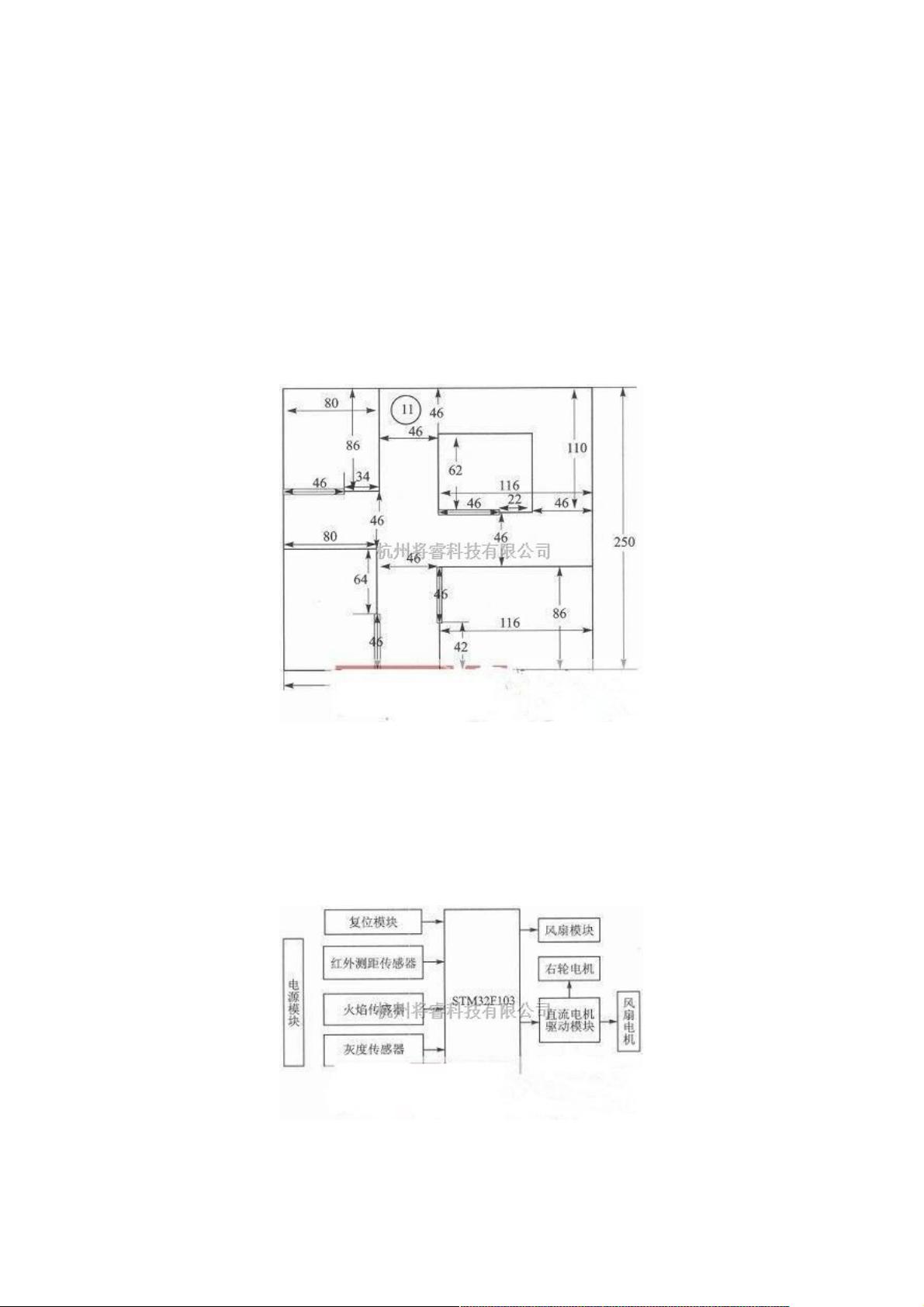
本设计的研究初衷来源于灭火机器人比赛,比赛场地将采用国际标准比赛场地,比赛场地平面图如图1所示。比
赛场地的墙壁高为33cm,厚为2 cm,由木头做成。墙壁刷成白色。比赛场地的地板是被漆成黑色的光滑木制
板。场地中所有的走廊和门口都是46 cm的开口,一个白色的2.5 cm宽的白色带子或白漆印迹表示房间人口,在
距离火焰30 cm的圆上有一条2.5 cm宽的白线。根据要求,该机器人要在模拟的四室一厅房间内完成发现并确认
火源、灭火和回家(回到出发点H)等功能。 本文以STM32F103嵌入式芯片为核心,完成灭火机器人的
软、硬件设计。当机器人启动后,前部和左右的红外测距传感器为机器人的避障功能和沿墙走
工业电子中的一款基于工业电子中的一款基于STM32的智能灭火机器人设计的智能灭火机器人设计
类别:工业电子 发布于:2015/12/17 | 383 次阅读
本设计的研究初衷来源于灭火机器人比赛,比赛场地将采用国际标准比赛场地,比赛场地平面图如图1所示。比赛场地的墙壁高为33cm,厚为2 cm,由木头做成。
墙壁刷成白色。比赛场地的地板是被漆成黑色的光滑木制板。场地中所有的走廊和门口都是46 cm的开口,一个白色的2.5 cm宽的白色带子或白漆印迹表示房间人口,
在距离火焰30 cm的圆上有一条2.5 cm宽的白线。根据要求,该机器人要在模拟的四室一厅房间内完成发现并确认火源、灭火和回家(回到出发点H)等功能。
本文以STM32F103嵌入式芯片为核心,完成灭火机器人的软、硬件设计。当机器人启动后,前部和左右的红外测距传感
器为机器人的避障功能和沿墙走方式 提供参考信号。机器人的运动速度以及运动方向由处理器输出的PWM信号来控制。火焰
传感器检测房间内火源,发现火源后机器人朝向火源方向行走,底部的灰度 传感器检测地面白线判断机器人是否靠近火源,
控制机器人暂停,启动风扇灭火,灭火后回家。
1 系统硬件设计系统硬件设计
根据设计要求,本系统主要由STM32F103、传感器模块、直流电机驱动模块、风扇模块、电源模块等构成。系统框图如
图2所示。
1.1 机器人整体布局机器人整体布局
机器人左右两轮分别用两个转速和力矩完全相同的直流电机进行驱动,机器人前部装一个万向轮,这样,可以轻松地使机
器人改变运行方向和运动速度。机器人前面装有风扇、火焰传感器和红外传感器,头部底侧装有灰度传感器,左右两侧各有3
个红外测距传感器,两侧的传感器可以分别测量不同范围内的障碍物距离。
1.2 微控制器微控制器模块模块
下载后可阅读完整内容,剩余3页未读,立即下载
1164 浏览量
3245 浏览量
2025-01-03 上传
319 浏览量
211 浏览量
111 浏览量
234 浏览量
2024-12-31 上传

weixin_38501810
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Premiere Pro CS6视频编辑项目教程微课版教案
- SSM+Lucene+Redis搜索引擎缓存实例解析
- 全栈打字稿应用:演示项目实践与探索
- 仿Windows风格的AJAX无限级树形菜单实现教程
- 乐华2025L驱动板通用升级解决方案
- Java通过jcraft实现SFTP文件上传下载教程
- TTT素材-制造1资源包介绍与记录
- 深入C语言编程技巧与实践指南
- Oracle数据自动导出并转换为Excel工具使用教程
- Ubuntu下Deepin-Wine容器的使用与管理
- C语言网络聊天室功能详解:禁言、踢人与群聊
- AndriodSituationClick事件:详解按钮点击响应机制
- 探索Android-NetworkCue库:高效的网络监听解决方案
- 电子通信毕业设计:简易电感线圈制作方法
- 兼容性数据库Compat DB 4.2.52-5.1版本发布
- Android平台部署GNU Linux的新方案:dogeland体验
