FANUC机器人有效负载设置详解及操作指南
需积分: 49 126 浏览量
更新于2024-09-11
收藏 99KB DOC 举报
FANUC PAYLOAD 设置是FANUC机器人系统中的一项关键功能,它用于确保机器人在执行任务时能够正确处理法兰盘上工具和工件的重量。有效负载包括实际重量以及负载在空间中的分布,如重心位置和转动惯量。该设置对于机器人的动力性能和精度至关重要。
1. **有效负载概念**:
- 机器人有效负载指的是法兰盘上工具和工件的总重量,包括它们对机器人动态性能的影响,如运动速度、加速度和稳定性。
- 在软件安装时需要正确设置,更换工具或工件后可能需要重新调整,以保证机器人的安全和效率。
2. **设置方法**:
- **手动设置**:
- 必须在SRDY信号开启,无运动命令,并且$PARAM_GROUP[].$MOUNT_ANGLE未设置,且机器人已完成mastering/calibration的前提下进行。
- 通过MENUS > SYSTEM > F1[TYPE] > Motion进入界面,输入有效负载编号并确认。
- **示教指令设置**:
- 使用PAYLOAD[GPx:y]指令,其中y表示负载编号,x表示应用组号,要求先有已设置的负载。
3. **有效负载进度表管理**:
- 可以手动输入负载的各项参数,如重量、重心偏移(CENTERX、CENTERY、CENTERZ)、转动惯量等,这些数据在图4界面中输入。
- 提供了两种设置方式:手动输入,即直接在图1中通过F3DETAIL进入详细输入界面;自动估算,适用于无法精确测量但需要快速设置的情况。
4. **注意事项**:
- 设置时务必确保所选负载已在系统中配置。
- 重心偏移和转动惯量对于机器人运动控制非常重要,因为它们影响到机器人在负载变化时的动态响应和稳定性。
FANUC PAYLOAD 设置是FANUC机器人编程中的一个核心环节,它涉及到负载识别、参数输入和维护,对于提高机器人在实际生产过程中的性能和安全性至关重要。操作人员需严格按照设定条件和步骤进行,以保证机器人操作的准确性和安全性。
附件八 机器人 PAYLOAD 设置
1、概述
机器人的有效负载是指机器人法兰盘上工具和工件的重量。如果在软件安装时没
有设置正确的机器人有效负载或者由于更换法兰盘上的工具或工件而引起的有效负载
改变,必须设置机器人的有效负载。
最多可以设置 10 个有效负载列表,通过有效负载设置界面和使用示教程序指令来
指定负载,在 MOTION PERFORMANCE 界面下设置有效负载列表。
2、设置当前有效负载进度表
1)手动设置当前有效负载进度表
条件:
SRDY 置 on
没有运动命令
$PARAM_GROUP[].$MOUNT_ANGLE 没有被设置
机器人 mastering/calibration 已经完成
步骤:
1、 MENUS----SYSTEM----F1 [TYPE]
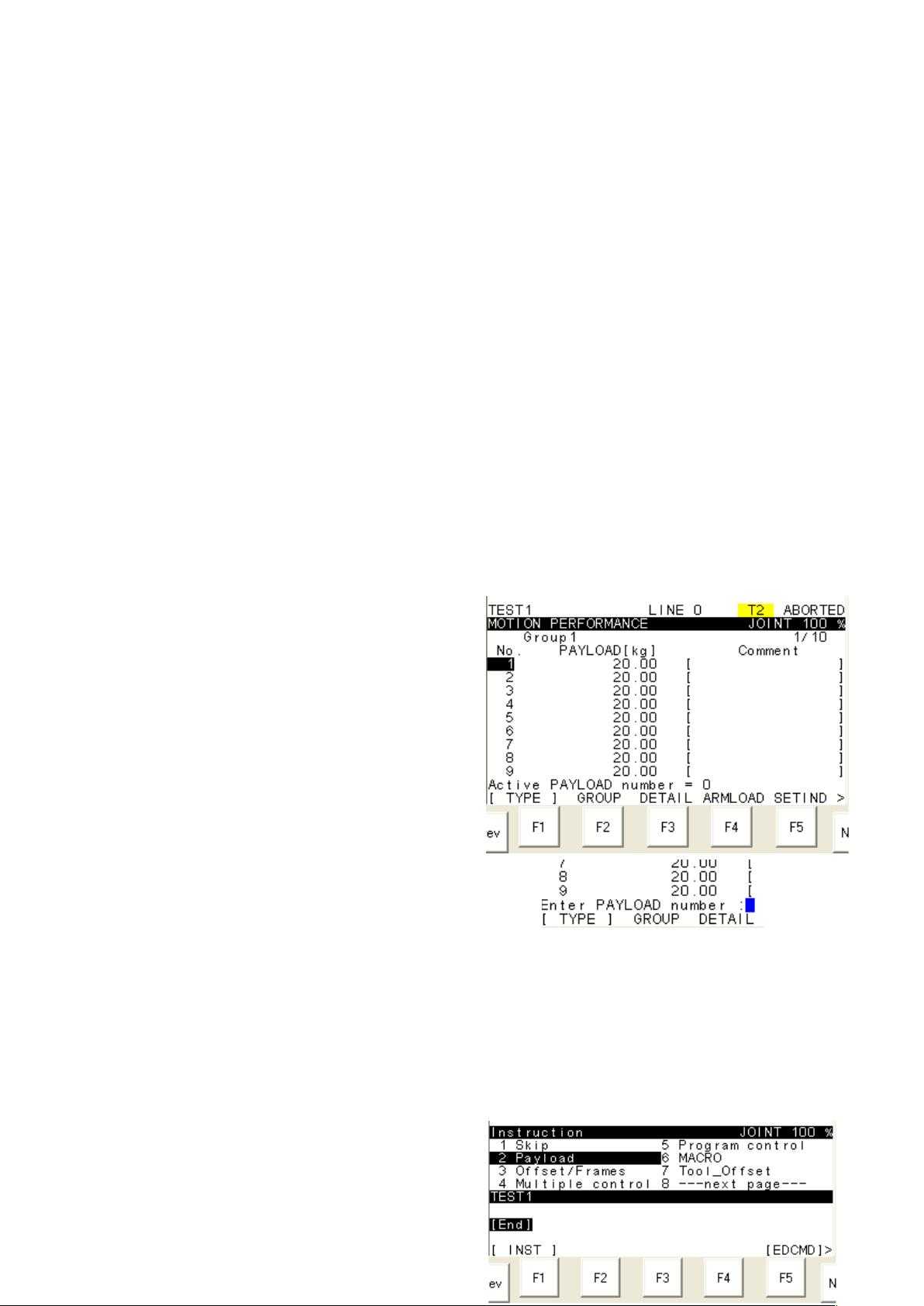
---- Motion,进入图 1 所示界面:
图 1
2、按 F5 SETIND,出现图 2 界面,
输入要激活的有效负载的号码,
然后回车来确认
图 2
2)用示教指令来设置当前的有效负载
条件:
指定的负载必须是已经设置好的
当多组应用时,必须使用 PAYLOAD[GPx:y] 指令来选择适当的负载, y 指负载
号码, x 指组号
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-02-27 上传
2021-09-26 上传
2022-07-10 上传
2022-07-10 上传
2022-07-03 上传

haining1987x
- 粉丝: 1
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
