"工业机器人轨迹规划与控制方法研究"
版权申诉
162 浏览量
更新于2024-02-21
收藏 756KB DOC 举报
工业机器人的轨迹规划和控制一直是工业自动化领域中的关键问题。工业机器人操作臂被广泛应用于各种生产场景中,通过快速、准确和高质量的操作来提高生产效率。在不同的应用中,工业机器人的末端执行器需要在工作空间中移动到特定位置,或者沿着特定路径进行运动。在某些应用中,比如焊接、切割、喷涂等,机器人必须沿着特定轨迹运动,以完成复杂的任务。
在进行轨迹规划时,需要考虑到末端执行器的速度、加速度、轨迹误差等因素。如果没有充分考虑这些限制条件,轨迹规划可能会变得非常复杂,导致机器人运动不稳定,出现超调等问题。特别是在笛卡尔轨迹中存在急转弯或复杂曲线的情况下,机器人的表现可能会更加恶化。
迄今为止,已经提出了许多不同的轨迹规划算法,包括笛卡尔轨迹规划和时间最优轨迹规划等。然而,大多数这些方法并不能直接应用于工业机器人系统中,原因主要有两点:第一,这些技术往往是在理想情况下设计和实现的,而实际工业系统存在着各种复杂的限制和约束条件;第二,工业机器人系统通常需要高效的实时控制和运动规划,以满足生产线的需求。
因此,为了实现高效、稳定的机器人轨迹规划和控制,需要综合考虑机械系统、控制系统和轨迹规划算法之间的关系。在工业机器人系统中,通常会使用基于关节空间和笛卡尔空间的轨迹规划方法。在关节空间中,机器人的关节角度被当作自由度来调节,从而实现末端执行器的运动控制;而在笛卡尔空间中,机器人的末端执行器的位置和姿态被直接规划和控制,以实现特定的轨迹运动。
在实际应用中,工业机器人的轨迹规划和控制往往需要考虑到以下几个方面:首先,机器人系统的动力学特性和运动学约束需要被充分考虑,以确保机器人的运动稳定和精准度;其次,轨迹规划需要综合考虑到生产线的实际需求,比如生产速度、质量要求等;最后,实时性和计算效率也是一个重要的考虑因素,特别是在高速生产线中。
在未来,随着人工智能和机器学习技术的不断发展,工业机器人的轨迹规划和控制将会更加智能化和自适应化。通过深度学习和强化学习等技术的应用,机器人可以更好地适应不同的生产环境和任务需求,从而提高生产效率和质量。同时,基于云计算和物联网技术的发展,工业机器人系统可以与其他系统实现实时数据交互和协作,实现智能化的生产运行。
总的来说,工业机器人的轨迹规划和控制是一个复杂而关键的问题,需要综合考虑机械系统、控制系统和运动规划算法之间的相互作用。通过不断地研究和创新,可以实现更加稳定、高效的工业机器人系统,从而推动工业生产的发展和进步。
. -
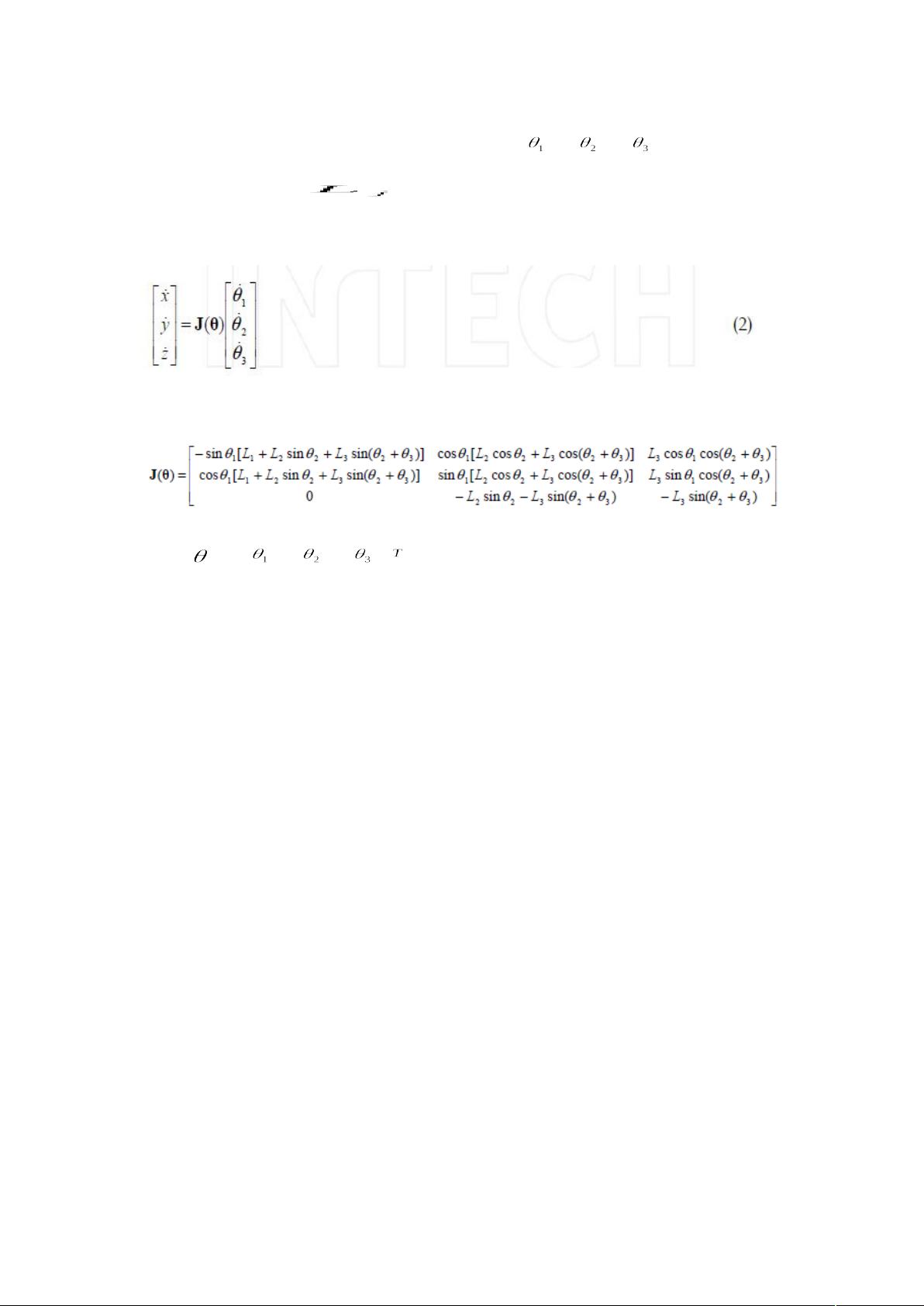
(x,y,z)是末端操作器的位置坐标, , , 是相应的节
点构造位置。 是连杆长度。通过对〔1〕式微分
可以得到笛卡尔速度和节点速度之间的关系如下:
雅克比矩阵为:
其中 = [ , , ] 是操作臂的位置。
2.2 工业机器人操作臂节点动力学
工业机器人操作臂被设计来满足需求,比方焊接,切削,
局部操纵等。特定的规格一般被限制在确定的准确性,速
度和复杂性上。因此,大多数工业机器人操作臂经常被设
计参加带有限流电源放大器的 PID 控制器。电流的限度决
定了节点加速的限制。此外,不管未知的惯性力矩,科里
奥利力矩,离心力矩,节点是被独立控制的,摩擦力矩和
重力矩被视作控制器的干扰。为了支持这个假设,操作臂
连杆被设计为低惯性,节点被尽可能少的传动装置驱动。
这些控制器很简单,也提供很有效的鲁棒性。图 2 举例说
明了一个工业机器人操作臂的三自由度解耦节点动力学模
型。
. .zj.
剩余15页未读,继续阅读
2023-03-01 上传
2023-07-11 上传
2021-11-26 上传
2021-10-29 上传
2021-11-16 上传
2023-07-12 上传

pyhm63
- 粉丝: 10
- 资源: 20万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- TMS320LF2407_DSP结构、原理及应用实验指导书
- iBATIS-SqlMaps
- 将基于PC的算法转至DSP
- MyEclipse 7 在WebLogic 9.2 上开发Web Service范例
- loadrunner 使用手册中文版
- 城市LMAS系统的优化设计与实现
- EDA技术,跑马灯源程序
- 基于Proteus的定时小闹钟万年历
- 光学专业英语optical vocabulary
- 深入浅出Oracle EBS之核心功能
- WiMAX.Standards.and.Security.Sep.2007.pdf
- PCSX2Extremum
- 计算机外文翻译,文献综述
- 酒店客房管理系统的设计论文
- Silverlight+2系列
- 电信计费系统毕业论文
