




AT89C52单片机驱动的消防救援机器人设计
需积分: 9 12 浏览量
更新于2024-09-04
1
收藏 535KB PDF 举报
"该资源是一篇关于基于AT89C52单片机设计的消防救援机器人的技术文章,由东北大学机械工程与自动化学院的研究人员编写。文章介绍了机器人采用的机械结构和控制系统,包括复合式履带车体、六自由度机械手以及数据采集、执行机构控制、通信系统等方面的设计,旨在提升火场救援的安全性和效率。"
本文主要探讨了在消防救援领域中应用基于AT89C52单片机的遥控机器人技术。AT89C52是一种常见的8位微控制器,广泛用于嵌入式系统设计。在这个项目中,它作为车载控制器,负责管理机器人的各项功能。计算机作为远程控制端,通过通信系统与机器人进行交互。
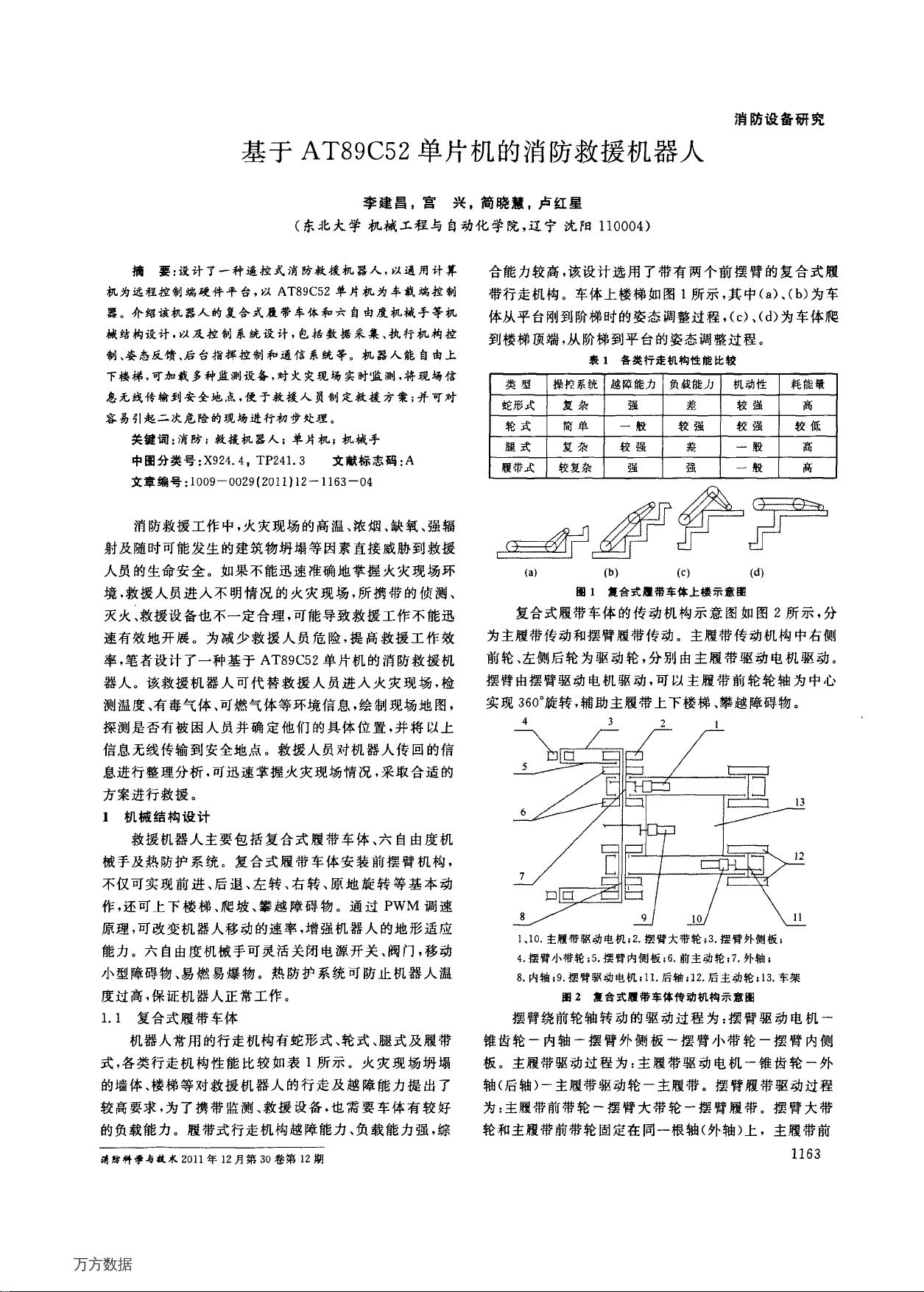
机械结构方面,救援机器人采用了复合式履带车体,能够应对复杂地形,如楼梯、坡道和障碍物,增强了其在火场的机动性。履带式设计提供了良好的负载能力和越障能力。车体还配备了前摆臂机构,允许机器人进行多种运动模式,如原地旋转。此外,六自由度机械手可以执行精细操作,如关闭电源、开关阀门,甚至移动小物体,这对于现场的初步处理非常关键。
控制系统设计是机器人功能实现的核心。数据采集模块用于收集环境信息,如温度、有毒和可燃气体浓度,这些信息对于评估火场状况至关重要。执行机构控制则负责驱动机械手和履带车体的动作。姿态反馈系统确保机器人能准确感知自身位置和状态,这对于远程操作的精度和安全性至关重要。后台指挥控制是决策中心,接收机器人传回的信息并制定救援策略。通信系统使用无线技术,能在保持安全距离的同时,实时传输火场数据。
消防救援机器人能够代替人类进入危险环境,降低了救援人员的风险,提高了救援效率。它可以实时监测火场,绘制现场地图,探测被困人员位置,并对可能引发二次危险的情况进行初步处理。这种基于单片机的机器人设计,体现了信息技术在改善公共安全、提高应急响应能力方面的巨大潜力。通过不断的研发和优化,未来消防救援机器人将更加智能化,为火灾救援带来更高的科技支持。
万方数据
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐






weixin_38743737
- 粉丝: 379
 我的内容管理
展开
我的内容管理
展开








最新资源
- Eclipse 3.6中文语言包发布:完美支持Helios版
- 深入解析Java集合类及其重要性
- VB编程技巧:创建ToolTip窗口控件教程
- Gamejack工具:加密光盘隐藏扇区的强力复制解决方案
- 2014-2015年度最佳CSS愚人节恶作剧精选
- Android蓝牙通信实现与数据交互详解
- 深入学习企业级JAVA高级工程师培训课程
- 共享jquery-1.4.2.js压缩包,便于开发使用
- 掌握JavaScript开发Windows商城应用
- Ruby语言实现微店开放平台API教程
- Atheros AR5006/AR5416无线USB驱动程序安装指南
- 实现ScrollView指定控件显示的简单示例
- Zumo32U4在Gmapping和cartographer环境构建的应用
- VC课程设计:开发科学计算器及实验报告
- 大数据入门:如何利用数据挖掘实现竞争优势
- 掌握UML:软件系统建模与编程的核心技术






















