模糊PID遗传算法优化两航天器定向机动
88 浏览量
更新于2024-06-18
收藏 3.08MB PDF 举报
本文主要探讨了"两航天器定向机动优化模糊PID控制方法"这一主题,由作者A.Kosari、H.Jahanshahi和S.A.Razavi在德黑兰大学新科学和技术学院提出。他们针对航天器对接机动过程中最关键的部分——定向运动,设计了一种创新的控制策略。这项研究采用了模糊比例积分微分(FPID)控制器,结合了遗传算法优化,旨在提高对接机动的效率和精度。
FPID控制器的设计基础是单输入模糊推理机(SIFIMs)和动态连接模糊推理机(PIFM),它利用欧拉陀螺方程来精确控制航天器的定向阶段。控制器的关键输入是欧拉角误差信号和跟踪器角速度误差信号,这些信号通过遗传算法进行优化,目标函数设定为距离误差、角度误差以及控制力的最小化,同时受到动量轮产生动量的最大限制作为优化约束。
遗传算法在此过程中起到了关键作用,通过多目标遗传算法(MOGA)求解控制器参数的三维Pareto前沿,实现了多个性能指标之间的平衡。这种优化方法有助于减少超调量,即对接机动中的一个重要性能指标,从而提升系统的稳定性和响应速度。对比其他类似研究,文中提到的新控制器在控制效果、调节时间和超调量等方面表现优越,显示了在实际航天任务中具有显著的优势。
值得注意的是,本文的研究成果受到了CC BY-NC-ND许可证的保护,这意味着其研究成果可以自由分享和修改,但只能用于非商业目的且不得进行衍生作品创作。这项工作对于航天器对接机动控制领域的理论发展和技术改进具有重要意义,为未来太空探索提供了实用的控制策略。
296 A.
科萨里和 其他
/
工程 科学 技术,国际 期刊
20
(
2017
)
293
表
5
图六、每一个成员函数
形成状态空间形式。在这里,SIFIM动态连接的PPENS被用作两个模
糊推理机。采用遗传算法确定控制器参数。冲突目标函数的三维Pareto
边界(由MOGA获得)是距离设定点的距离误差,角度设定点的误差和
控制努力。优化约束是动量轮产生的动量的最大值。最优控制点的计算
结果表明,所设计的控制器能够有效地降低跟踪器定位阶段的成本,满
足跟踪任务时间要求。最后,com-
航天器系统的规则。
If Then
jX
2
j HS W
1
¼
0
jX
2
j HM W
2
¼
0
:
5
jX
2
j HB W
3
¼
1
jX
5
j HS W
4
¼
0
jX
5
j HM W
5
¼
0
:
5
JX
5
J HB W
6
¼
1
JX
8
J HS W
7
¼
0
jX
8
j HM W
8
¼
0
:
5
jX
8
j HB W
9
¼
1
为了消除稳态误差和缩短上升时间,在状态变量中增加了积分项。
Sahib[34]
提出了一种使用粒子群优化的自动电压调节器(
AVR
)的
优化比例、积分、微分和二阶微分阶数(
PIDD
2
)
Ortega
和
Giron-
Sierra[35]
研究了使用遗传算法(
GAs
)通过寻找隶属函数的最佳模
糊集来执行模糊控制器的优化,以优化对接时间和燃料消耗。
针对航天器对接机动中的姿态部分,提出了一种新的最优Fuzzy-
PID控制策略。为了推导对接定向阶段的控制方程,使用欧拉
与同类工作相比,本文的工作在某些系统性能参数(如建立时间和超调
量)上的优越性得到了讨论。
2.
最优模糊
PID
控制器设计
在这一部分中,针对追踪航天器设计了最优模糊PID控制器。对于跟
踪器和目标航天器的定向运动,采用模糊PID控制器。图1展示了在这项
工作中设计的控制器结构的示意图。如图所示,将输出与它们的期望输
入值进行比较,并形成作为模糊和PID控制器的输入的误差函数。 基础
和调节变量,
h-u-w 方向的遗传算法和误差函数,
被认为是模糊控制器的输入。模糊控制器计算
计算
PID
控制器的积分
-
比例
-
微分系数,再乘以
PID
控制器输入误差
的积分
-
比例
-
微分,得到最终的控制力
2.1.
取向
首先提出了航天器的预期任务和所需系统,然后研究了航天器成
功完成预定任务的
RVD
任务可以打破
见图
7
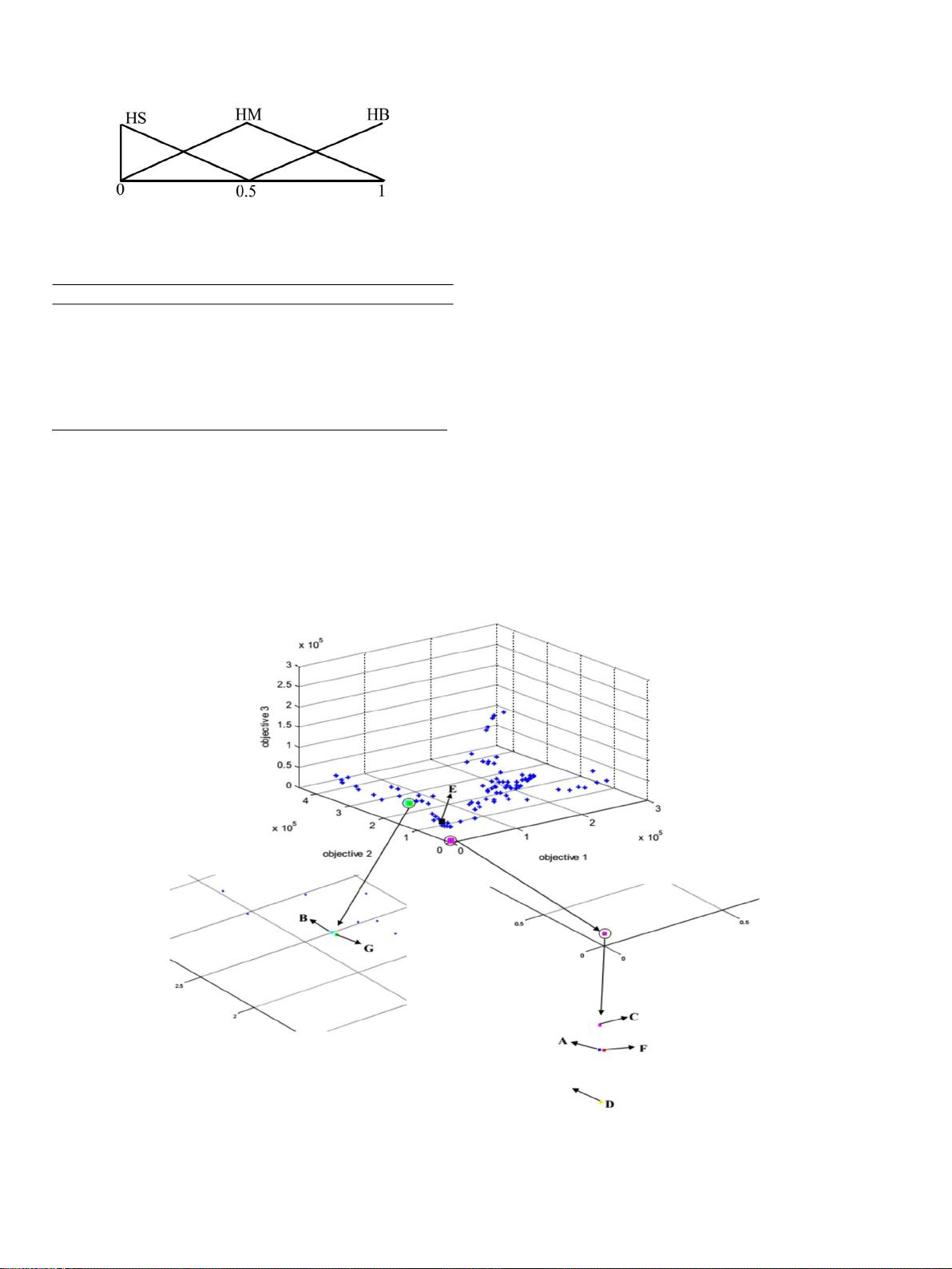
。 目标
1
、
2
、
3
的追踪航天器定向阶段最优模糊
PID
的三维
Pareto
阵面。
剩余16页未读,继续阅读
2024-05-02 上传
2021-10-10 上传
2021-01-13 上传
2021-09-11 上传
2021-04-16 上传
2021-09-08 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
