Simulink子系统封装与S-function基础讲解
需积分: 10 145 浏览量
更新于2024-07-18
收藏 1.33MB PPT 举报
"MATLAB子封装技术主要涉及Simulink中的子系统(Subsystem)和S-函数(S-function)的概念、构建方法以及应用。子系统是将复杂的模型分解为更小、更易管理的部分,提高模型的可读性和复用性。而S-函数则允许用户自定义Simulink中的行为,扩展Simulink的功能。"
在MATLAB的Simulink环境中,子系统是模型组织的重要方式。它模仿了多种编程语言中子程序的概念,如FORTRAN的子程序和C语言的函数。MATLAB中的函数式M文件与此相似,而Simulink的子系统则进一步将模型模块化,使得大模型得以分解,提高了模型的可读性和维护性。子系统还能作为重复使用的模块,避免在复杂系统建模时的错误。
创建Simulink子系统有两种基本途径:一是通过编辑现有模型,选择【Edit/Create Subsystem】命令,将部分或全部模型转化为子系统;二是直接从Connections模块库中添加Subsystem模块来新建子系统。后者允许用户从头开始构建子系统,而前者则方便对现有结构进行封装。
以创建一个简单的三角函数方程子系统为例,用户可以通过选择模型中的模块,然后右键拖动并选择“Create Subsystem”,快速将选中的模块封装到子系统中。这种方式既快捷又直观,对于大型模型的管理和复用尤其有效。
接下来,我们转向S-函数,它是Simulink中的核心组件,用于定义自定义的动态系统行为。S-函数在Simulink中起到了扩展作用,允许用户使用C、C++或MATLAB代码编写底层执行逻辑,以满足特定的仿真需求。S-函数的工作原理涉及到输入输出处理、仿真时间步进管理等多个方面,包括初始化、模拟更新、输出计算等关键步骤。
理解S-函数中的几个核心概念至关重要,例如,S-函数的结构、输入输出信号的处理、以及如何与Simulink的仿真引擎交互。S-函数模块提供了自定义模型行为的接口,通过这些接口,用户能够实现高度定制的动态系统模型,从而解决特定的仿真问题。
MATLAB的子封装技术结合了子系统和S-函数,为Simulink用户提供了一套强大的工具,以构建、管理和复用复杂的动态系统模型。掌握这些技术,能够显著提升建模效率,同时保证模型的准确性和可扩展性。

重 庆 大
重 庆 大
学
学
© 2008 HFUT
Simulink 专题讲座
11
CHONGQING UNIVERSITY
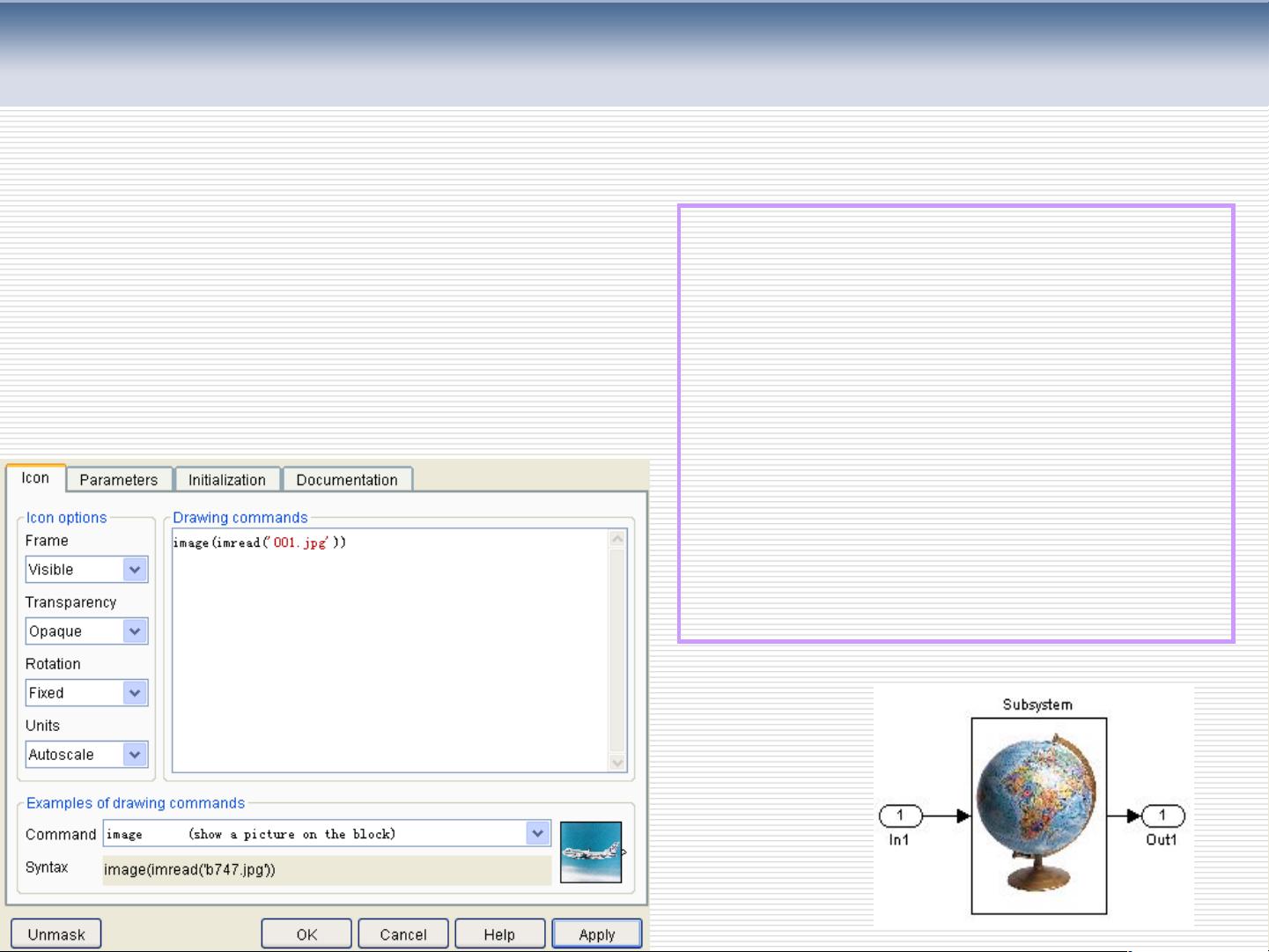
为了更好的理解封装的含义,见 exb2_1
所示的模型。此模型与例 exb2_1b 中的模
型完全等价,但它要更容易使用。

剩余63页未读,继续阅读
160 浏览量
163 浏览量
133 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
1210 浏览量
点击了解资源详情

星游记123
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实现类似百度的邮箱自动提示功能
- C++基础教程源码剖析与下载指南
- Matlab实现Franck-Condon因子振动重叠积分计算
- MapGIS操作手册:坐标系与地图制作指南
- SpringMVC+MyBatis实现bootstrap风格OA系统源码分享
- Web工程错误页面配置与404页面设计模板详解
- BPMN可视化示例库:展示多种功能使用方法
- 使用JXLS库轻松导出Java对象集合为Excel文件示例教程
- C8051F020单片机编程:全面控制与显示技术应用
- FSCapture 7.0:高效网页截图与编辑工具
- 获取SQL Server 2000 JDBC驱动免分数Jar包
- EZ-USB通用驱动程序源代码学习参考
- Xilinx FPGA与CPLD配置:Verilog源代码教程
- C#使用Spierxls.dll库打印Excel表格技巧
- HDDM:C++库构建与高效数据I/O解决方案
- Android Diary应用开发:使用共享首选项和ViewPager
