ARM处理器与单片机通信解决方案:基于A19lRM9200和ATmegal28
55 浏览量
更新于2024-08-31
收藏 260KB PDF 举报
"嵌入式系统/ARM技术中的单片机与ARM系列处理器通信问题的解决方案"
在嵌入式系统设计中,特别是在涉及多种处理器架构的系统中,如何有效地实现单片机(如ATmegal28)与ARM系列处理器(如A19lRM9200)之间的通信是一个关键问题。本文以一个具体的硬件系统为例,阐述了如何构建这样的通信链路,以实现实时监控和控制电机系统的功能。
系统硬件设计包括以下几个主要部分:
1. 电源电路:A19lRM9200微处理器需要1.8V和3.3V电源,而其他外围设备可能需要不同电压等级的电源。为了满足这些需求,设计中采用了Sipex公司的SPXlll7M3-3.3和SPXlll7M3-1.8型低压差稳压器,它们可以将输入电压转换为所需的稳定电压,供各组件使用。
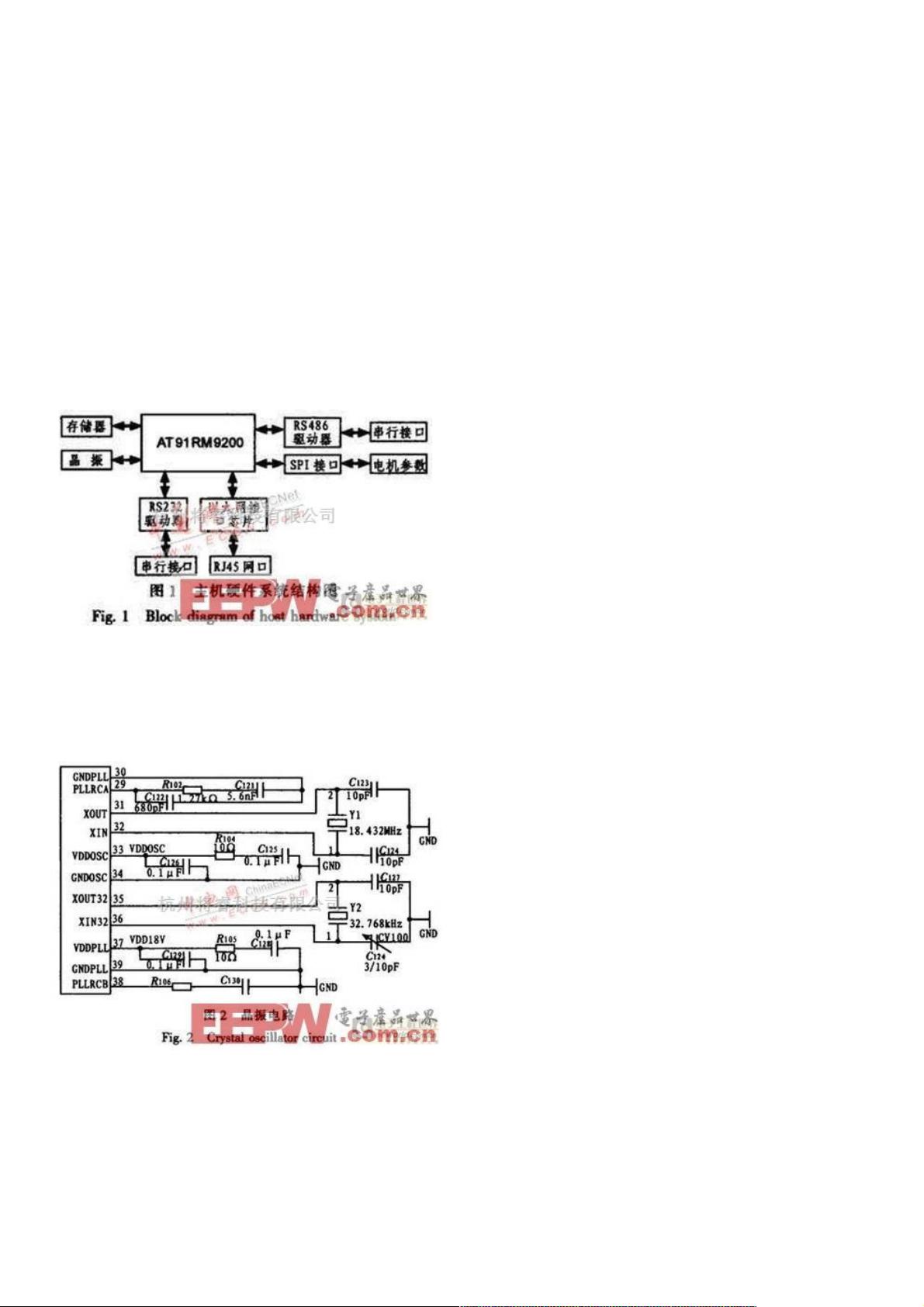
2. 晶振电路:晶振电路为系统提供精确的时钟信号。在本系统中,使用了两个无源晶体振荡器X1(18.432MHz)和X2(32.768kHz)。18.432MHz的晶振经过倍频后为A19lRM9200提供180MHz的工作时钟,而32.768kHz的晶振则作为慢时钟源。
3. 处理器:A19lRM9200是基于ARM920T内核的高性能、低功耗微处理器,具备26位地址总线,可寻址最大64MB空间。它的双向32位外部数据总线支持不同数据宽度的通信,是整个系统的控制核心。
4. 存储器:存储器配置包括8MB的Flash和32MB的SDRAM。Flash通常用于存储程序代码和非易失性数据,而SDRAM用于高速数据交换和临时存储。
5. 扩展接口:系统扩展了以太网接口和串行接口,这些接口使得远程通信和数据传输成为可能。同时,还包括输入输出接口,便于连接各种传感器和执行器,例如电机控制系统。
6. 电机控制:系统设计允许实时监控多路电机状态,并能独立调整每一路电机的转速和相位。这表明在单片机与ARM处理器之间存在有效的通信协议和接口,可能是通过串行通信协议(如SPI、I2C或UART)实现。
解决单片机与ARM处理器通信问题的关键在于选择合适的通信协议和接口。常见的协议如UART(通用异步接收发送器)、SPI(串行外围接口)和I2C(集成电路互连总线)提供了简单而灵活的通信方式,它们可以实现低速到高速的数据传输,并且支持多设备网络。
在具体实现中,需要编写适当的固件和驱动程序来驱动这些通信接口。在单片机端,可能需要编写控制电机的微控制器代码;而在ARM处理器端,可能需要开发运行实时操作系统(RTOS)的应用程序,以管理电机控制任务并处理来自其他系统的通信请求。
构建这样的嵌入式系统涉及到硬件设计、软件编程和通信协议的选取。通过精心设计和优化,可以实现高效、可靠的单片机与ARM处理器间的通信,从而在复杂系统中发挥各自的优势,完成预定的功能。
嵌入式系统嵌入式系统/ARM技术中的单片机与技术中的单片机与ARM系列处理器通信问题系列处理器通信问题
的解决方案的解决方案
导读:这里以A19lRM9200微处理器为CPU,ATmegal28系列单片机,8 MB的Flash和32 MB的SDRAM存储器,
扩展了以太网接口、串行接口等外围通信设备以及输入输出接口,根据处理器和其他接口芯片的要求设计了外
围硬件电路及软件。实现了用电机控制系统实时监控多路电机的状态,并且可以控制任一路电机的转速与相
位,解决了单片机与ARM系列处理器之间的通信。 1 系统硬件设计 1.1 主机硬件系统结构 1)电源
电路 AT9lRM9200需要1.8 V和3.3 V电源,另外,大部分外围器件需要3.3 V电源,小部分外围器件还需要5 V电
源。此处选用了Sipex公司生产的
导读:这里以导读:这里以A19lRM9200微处理器为微处理器为CPU,ATmegal28系列单片机,系列单片机,8 MB的的Flash和和32 MB的的SDRAM存储器,扩展了以太存储器,扩展了以太
网接口、串行接口等外围通信设备以及输入输出接口,根据处理器和其他接口芯片的要求设计了外围硬件电路及软件。实现了网接口、串行接口等外围通信设备以及输入输出接口,根据处理器和其他接口芯片的要求设计了外围硬件电路及软件。实现了
用电机控制系统实时监控多路电机的状态,并且可以控制任一路电机的转速与相位,解决了单片机与用电机控制系统实时监控多路电机的状态,并且可以控制任一路电机的转速与相位,解决了单片机与ARM系列处理器之间的系列处理器之间的
通信。通信。
1 系统硬件设计
1.1 主机硬件系统结构
1)电源电路 AT9lRM9200需要1.8 V和3.3 V电源,另外,大部分外围器件需要3.3 V电源,小部分外围器件还需要5 V电
源。此处选用了Sipex公司生产的SPXlll7M3-3.3型低压差(LDO)稳压器和SPXlll7M3-1.8型低压差(LDO)稳压器进行DC-DC变换
后为各个器件提供工作电压。
2)晶振电路 如图2所示,晶体振荡电路用于向AT91RM9200和其他需要时钟的外设电路提供工作时钟。本系统使用无源晶
体振荡器X1(18. 432 MHz)和X2(32.768 kHz)作为系统的主振荡器和慢时钟振荡器,其中32.768 kHz晶振为系统提供慢时
钟,18 MHz晶振通过倍频为系统提供180 MHz的主机时钟。
3)AT91RM9200处理器 ATglRM9200是Atmel公司基于ARM920T核的高性能、低功耗16/32位RISC微处理器,其最高主
频为180 MHz,其双向、32位外部数据总线支持8、16、32位数据宽度,26位地址总线可以对最大64 MB空间寻址。是系统的
工作和控制中心。
4)存储器 存储器模块包括Flash存储器和SRAM存储器2部分。Flash存储器用于存放引导程序、嵌入式操作系统、用户应
用程序及重要的数据等,即使掉电程序和数据都不会丢失。设计中采用Intel公司生产的28F640J3A,其存储容量为64 Mb(8
MB),工作电压为2.7~3.6 V,采用48引脚TSOP封装,16位数据宽度。
SDRAM存储器是系统代码的运行场所,存放系统运行时的程序和数据,但掉电后该部分程序和数据会丢失。设计中使用
2片数据宽度为16位的SDRAM并行运行作为1个32位数据宽度的SDRAM模块。
下载后可阅读完整内容,剩余3页未读,立即下载
259 浏览量
1026 浏览量
2020-10-21 上传
129 浏览量
104 浏览量
243 浏览量
116 浏览量
2020-10-22 上传
306 浏览量

weixin_38697444
- 粉丝: 9
- 资源: 834
 我的内容管理
展开
我的内容管理
展开







最新资源
- 对ASP.NET MVC项目中的视图做单元测试.txt
- java面试题 面试 java
- AJAX and java(英文)
- java程序员面试题
- Java最著名的开源项目
- Java领域的十大产品
- U盘 硬盘 文件夹自定义图标及背景
- IDL用戶培訓教程(初級入門)
- 屏蔽浏览器的后退按钮
- 如何在虚拟机安装Linux
- GEC2410开发板实战手册
- CCNA Boson NetSim 入门实战
- ps技巧,使用的一些常用技巧
- Configuring_FICO_Lawrence_Rebello
- Eclipse in Action A Guide for the Java Developer.pdf
- Struts快速学习指南
