五自由度机械手ADAMS运动学仿真研究
需积分: 49 130 浏览量
更新于2024-09-10
5
收藏 282KB PDF 举报
"基于ADAMS的五自由度机械手运动学仿真"
本文主要探讨了如何使用ADAMS软件进行五自由度机械手的运动学仿真。五自由度机械手是一种具有五个独立运动关节的机器人,能够在三维空间中实现复杂运动,常用于工业自动化生产中的搬运、装配等任务。ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款多体系统动力学仿真软件,它允许用户通过导入三维模型来分析机械系统的运动学和动力学特性。
首先,作者提到利用Pro/E(Protein Engineering)这款三维实体建模工具构建了五自由度机械手的实体模型。Pro/E是一款强大的计算机辅助设计软件,可以创建精确的几何模型,这对于机械手的设计和分析至关重要。在完成机械手的三维模型设计后,该模型可以被导入到ADAMS中。
在ADAMS中,机械手的实体模型与Pro/E模型保持一致,这样就可以进行运动学仿真。运动学是研究物体在不考虑力的影响下,物体的位置、速度、加速度随时间变化的规律。对于机械手来说,运动学分析主要关注各关节的旋转角度、末端执行器的空间位置和姿态。通过ADAMS的仿真,可以得到机械手在不同输入信号下的运动轨迹,这对于理解和优化机械手的工作性能非常有用。
此外,运动学仿真的结果使得机械手的运动过程可视化,这意味着研究人员可以直观地看到机械手在执行特定任务时各个关节的运动情况,有助于发现潜在的设计问题,如干涉或运动限制。这种可视化对于机械手的控制策略设计也具有重要意义,因为它为控制器的开发提供了依据,可以预测和调整机械手的动作以达到预期的效果。
文中还提到了机械手在多个领域的应用,如高温、危险环境下的操作,以及在铸造、锻造等工艺过程中的使用。这些应用表明,机械手不仅可以提高生产效率,还能确保工人的安全,同时保证产品的质量和精度。因此,对于机械手的运动学和动力学分析是提高其性能和可靠性的关键步骤。
通过ADAMS进行五自由度机械手的运动学仿真是一种有效的设计和分析方法,它能够帮助工程师理解机械手的动态行为,优化设计,并为控制策略的制定提供依据。这一技术的应用对于推动工业机器人技术的发展具有重要作用。
祝耱2007年第12期总第34卷
机器人技术
·71·
基于ADAMS的五自由度机械手运动学仿真
曹春芳,孑L庆忠
(内蒙古工业大学机械学院,内蒙古呼和浩特010051)
摘要:利用三维实体建模软件Pro/E建立五自由度机械手的实体模型,并导入多体系统动力学仿真软件ADAMs中对其
进行运动学仿真分析,使机械手整个运动过程直观化并对机械手的动力学分析及控制奠定了基础。
关键诃:啪;ADAMs;机械手;运动学仿真
中图分类号:TP241
文献标识码:A
文章编号:1006一0316(2007)12—0071一03
Kjnematics
simulation
of
5-Dof
robot
based
on
ADAMS
CA0
Chun—fang,KoNG
Qing—zhong
(College
of
Mechanical
Engineering,I彻er
Mongolia
Ulliversity
of
rIkhnology,HIlllhot
01∞51,China)
Abstract:In
mis
p印er
throu曲establishing
a
Pm/E
simulation
model
of
a
5-Dof
robot,and
aIl
ADAMS
simulation
model
which
equal
to
me
Pro/E
model,c删ed
out
me
kinematics
simulation
of
me
mbot,men
the皿oVement
process
of
tlle
robot
is
clearly
visible.Which
can
be
refered
by
me
dynamics
analysis
aIld
contml
of
me
robot.
Key
woI.ds:P艘;ADAMS;robof;垴nematjcs
sjmulatjon
随着科学技术的发展,机械手已经广泛应用于
各个领域,将操作人员从繁重、单调、重复的体力
劳动中解放出来。特别是在高温、危险、有害的作
业环境(放射性、有毒气体、粉尘、易燃、易爆、
强噪声等)中,可用机械手代替人的部分操作。在
铸造、锻造、冲压、切削加工、喷漆、装配等各种
工艺过程中都已用到机械手。这不仅大大提高了生
产效率,同时也极大地提高了产品的加工精度和产
品质量,可以说工业机器人的应用对工业的发展起
到了巨大的推动作用。因此,对于机械手的分析研
究是非常有意义的。本文主要对一个五自由度机械
手的运动在虚拟环境下作了分析。
ADAMS
(Automatic
Dynamic
Analysis
of
Mechanical
system)是目前应用比较广泛的虚拟样
机技术软件。所谓虚拟样机技术是一种在获得物理
样机之前,允许技术人员使用系统仿真软件,在各
种虚拟环境中真实地模拟系统的运动,并对其在各
种工况下运动和受力情况进行仿真分析,观察并试
验各组成部件的相互运动情况,它可以在计算机上
方便地修改设计缺陷,快速分析多种方案,进行对
物理样机而言难以进行或根本无法进行的试验,直
到获得系统级的优化方案,缩短开发周期。
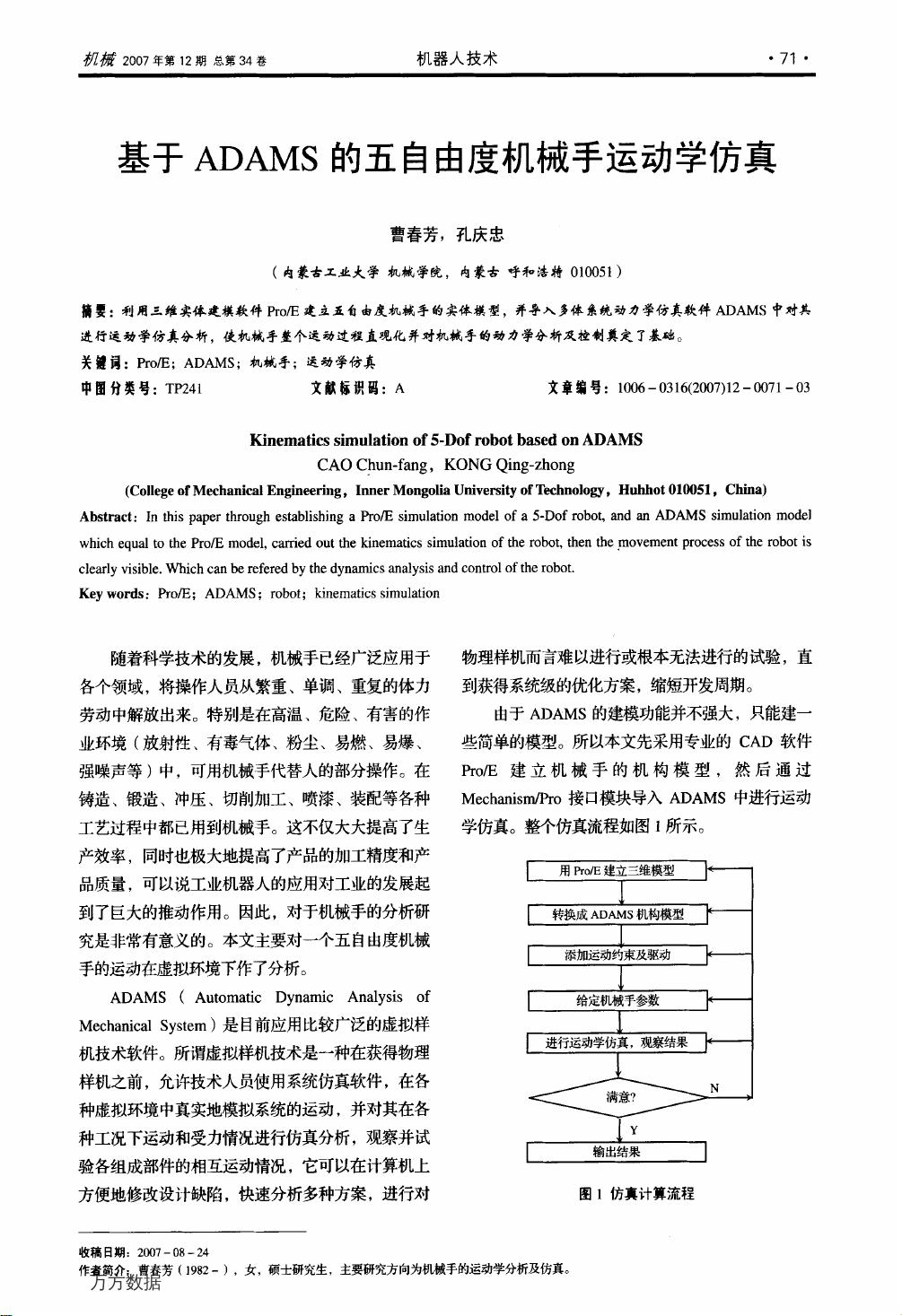
由于ADAMs的建模功能并不强大,只能建一
些简单的模型。所以本文先采用专业的cAD软件
Pro/E建立机械手的机构模型,然后通过
Mechallisnl/Pro接口模块导入ADAMs中进行运动
学仿真。整个仿真流程如图1所示。
收稿日期:2007一08—24
作者简介:曹春芳(1982一),女,硕士研究生,主要研究方向为机械手的运动学分析及仿真。
图l仿真计算流程
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载
131 浏览量
199 浏览量
169 浏览量
213 浏览量
2021-10-11 上传
2022-04-27 上传

xjj907327556
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ STL编程指南:设计组件解析
- 网站数据加密技术解析:DES、三重DES与RSA算法
- 单片机实验:LED闪烁灯实现与延时程序设计
- ABAP开发中常见问题及表结构查询方法
- RESTful HTTP应用实践与关键原则解析
- Java初学者指南:抽象类与接口解析
- CA3140A高增益运算放大器:集成MOSFET与双极晶体管的高性能解决方案
- 提升效率:Eclipse快捷键大全
- ActionScript 3.0 动画基础教程:从入门到精通
- AVR单片机实现的数字式SF6气体密度继电器设计
- ViSAGE:社会群体演化模拟与分析虚拟实验室
- Spring整合Struts与Hibernate:业务系统开发实践
- ActionScript 3.0 Cookbook 中文版:权威指南
- 信息技术在教务管理中的应用:Visual Basic6.0环境下的学生管理系统
- DIV+CSS学习难点实战经验梳理
- EJB设计模式解析:门面模式的应用与优势
