Kinect驱动的家庭助理机器人:关爱老人与儿童的新方案
60 浏览量
更新于2024-09-01
1
收藏 387KB PDF 举报
"基于Kinect的家庭助理机器人系统设计与实现,旨在解决老年人、病患及儿童的安全照顾问题。系统采用单服务器多客户端架构,利用Kinect设备和智能手机作为客户端,与服务器进行通信。机器人配备网络摄像头和舵机驱动的机械臂,能够执行体感控制的抓取任务,同时,通过手机APP实现远程监控和视频通话功能。硬件结构包括树莓派作为主控,以及带有8个自由度的舵机机械臂和轮式移动底盘。"
本文详细阐述了一个基于Kinect技术的家庭助理机器人系统的设计与实现,旨在为居家的老人、病人和小孩提供更好的关怀和安全防护。首先,系统采用了先进的单服务器多客户端模型,其中,Kinect传感器作为体感输入设备,用于捕捉人体动作,智能手机则作为一个远程控制终端,两者都连接到中心服务器。这一设计使得用户可以通过自然的体态动作来控制机器人,增强了交互的便捷性。
机器人实体由网络摄像头(IPCamera)作为头部,用于远程视频监控和视频通话,提供即时的视觉反馈。其臂部采用舵机驱动,具有8个自由度,能够模仿人类手臂的动作,便于抓取和搬运物品。腿部则是轮式结构,确保了机器人在室内的快速移动能力。树莓派作为主控芯片,负责处理和协调机器人的各种操作。
文章提到了当前社会老龄化和“空巢家庭”的问题,强调了这种机器人系统的需求背景。通过该系统,家人可以远程监控家中情况,及时了解老人和病人的状况,甚至在必要时进行视频通话,增强亲情互动。同时,体感控制功能使得不便行动的个体能通过简单的手势操作机器人,执行诸如取物等日常任务。
此外,该系统还可以解决一些常见的家庭安全问题,比如忘记关闭电器、气体泄漏或防盗等。通过手机APP,用户可以远程控制机器人检查和处理这些问题,降低了意外发生的可能性。
总体而言,基于Kinect的家庭助理机器人系统结合了先进的感知技术、灵活的机械臂和便捷的远程控制,为居家照顾提供了智能化解决方案,尤其适合现代社会的需求。这一系统不仅提高了生活便利性,也提升了家庭的安全水平,是信息技术应用于日常生活的一个良好示例。
基于基于Kinect的家庭助理机器人系统设计与实现的家庭助理机器人系统设计与实现
为了使独自在家的小孩、行动不便的老人和病人得到更好的照顾,设计了基于Kinect的家庭助理机器人系统。系
统采用单服务器多客户端模型,Kinect和智能手机作为客户端连接到服务器。设计制作了助理机器人,其头部为
网络摄像头,臂部为舵机结构,腿部为轮式结构。提出了基于Kinect的改进动作识别算法,实现了机器人的体感
控制,可帮助老人和病人抓取物体。设计了手机APP,在外的家人可远程监视室内情况,与家中的老人和病人
进行视频通话。
0 引言引言
老龄化社会提前到来,“空巢家庭”日趋增多,越来越多的老年人“照顾缺位”。子女在外上班,不能陪伴父母,一些身体虚
弱、生活不能自理的老人不能得到很好的照顾。老人独自在家时若发生一些意外事故,因无法快速地发送求救信号,从而不能
得到救助而造成严重后果。家人工作繁忙,一些生病或因残疾导致行动、生活不便的人,不能独自去拿水杯、药品等。家长出
门孩子独自留在家中,孩子由于调皮贪玩会跑到阳台等危险区域,因无实时的监管导致意外。现代年轻人工作压力和生活压力
加重,上班一族整天为工作奔波,常常会疏忽家里的琐事,忘记关灯、关空调等;家里出现煤气泄漏、水管漏水等危险情况,
未能及时处理而导致事故的发生;家里有盗贼进入时,不能及时报警而导致贵重财物被盗。
为了解决上述问题,设计了基于Kinect的家庭助理机器人系统。可通过Kinect体感控制机器人移动到指定地点并抓取物体,
也可用手机APP远程控制机器人,实时地监视室内情况。
1 系统硬件设计系统硬件设计
系统采用基于Java的单服务器多客户端模型,Kinect和智能手机分别作为客户端连接到运行在PC上的服务器
[1]
。Kinect通过
USB连接到电脑,利用串口通信将采集到的数据实时发送到服务器。智能手机通过WiFi连接到服务器,手机APP将控制信号
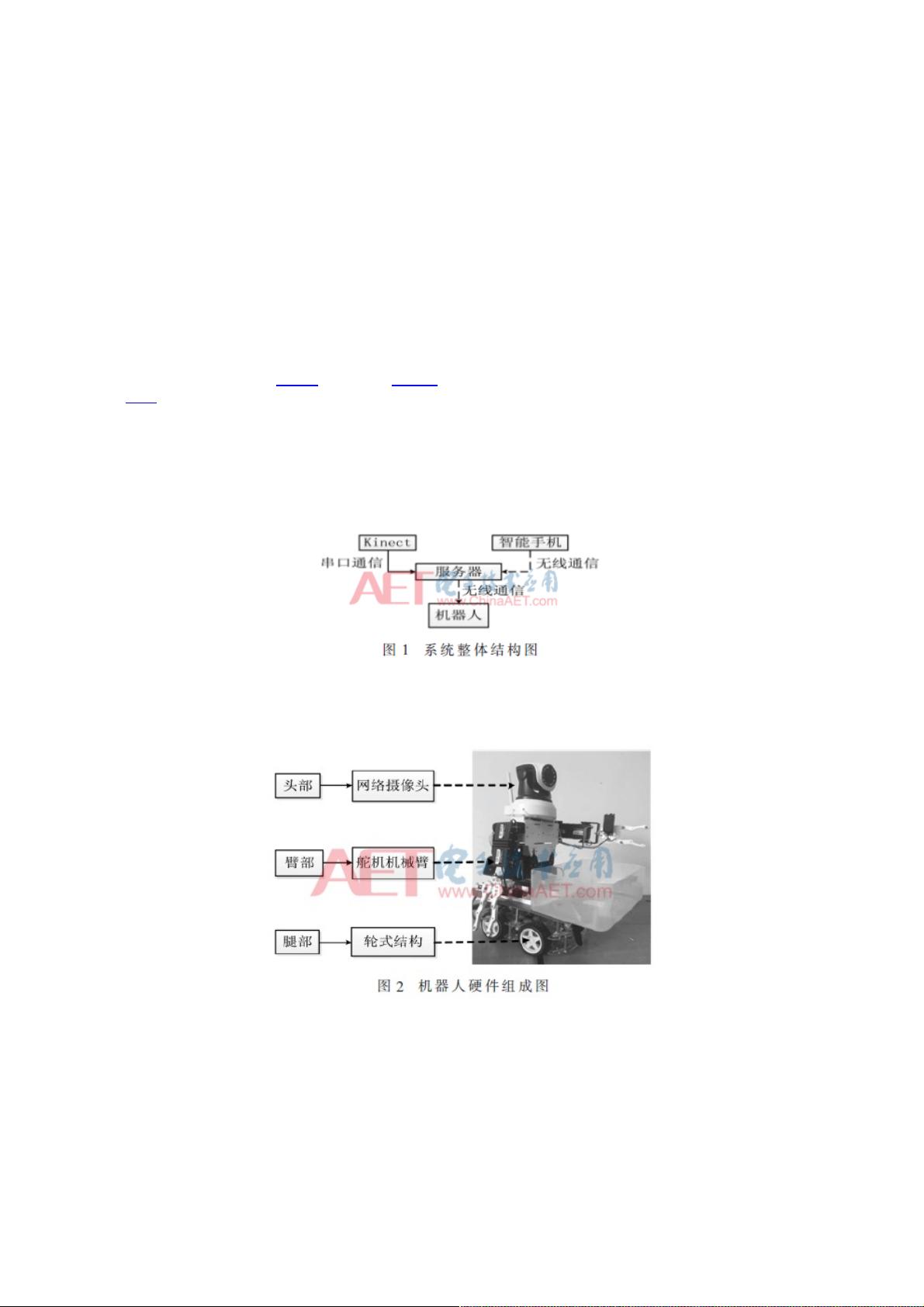
发送到服务器。服务器对客户端发来的数据进行实时采集、解析,并将控制信号发送给机器人。系统整体结构如图1所示。
机器人硬件组成如图2所示。机器人头部为网络摄像头IP Camera,主要功能有:远程视频监视、远程视频通话、智能报
警。机器人臂部为数字舵机结构,共8个自由度,机械臂末端为夹爪结构。机械臂可模拟人的双臂运动,可通过夹爪来抓取物
体。机器人的腿部为轮式结构,使其在室内更快捷、灵活地移动。
机器人的主控芯片采用树莓派,树莓派(Raspberry Pi)是只有信用卡大小的卡片式电脑。它配备一枚1.24 GHz的4核ARM架
构Cortex-A53处理器,SD卡作为储存媒体,主板周围有4个USB接口和一个网口
[2]
,利用USB接口可直接与Arduino相连。树
莓派内置无线WiFi模块,可与服务器进行无线通信。树莓派PWM输出能力有限,利用2片Arduino共同产生8路PWM控制机械
臂的8个舵机
[3]
。Arduino是一款便捷灵活、方便上手的开源电子原型平台,它搭载Atmel ATmega328处理器,有14路数字输
入输出端口。一片Arduino可同时产生6路PWM信号,并且Arduino开发软件提供标准的串口通信协议,可直接与树莓派通信。
树莓派通过USB与Arduino相连,通过串口通信将每个舵机控制信号发给Arduino。数字舵机根据PWM信号转动,实现0°~
180°的精确控制。此外,机器人上装有烟雾和温湿度传感器,可实时监测家中环境,发生煤气泄漏或火灾时可自动报警。
Kinect通过USB与服务器相连,完成人体骨骼数据的采集。采用Kinect for Windows,其工作原理是通过传感器上一个可见
光RGB摄像头和2个红外摄像头,使传感器能够采集彩色影像和3D深度图像
[4]
。采集图像时,Kinect传感器通过红外激光点阵
反馈图像信息到2个红外摄像头中,对操作者的X、Y、Z坐标进行3D扫描定位。此外,通过可见光RGB摄像头捕捉VGA级别
的图像
[5]
,可进行人物的身份识别。Kinect数据通过USB线缆传输到PC上,PC上的Kinect数据采集库对传感器传输而来的3种
不同的数据资料进行串联,将彩色图像和3D深度图像融合成为一个数据流,最后将数据流输出
[6]
。本次设计利用数据流中的
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-08-11 上传
2021-08-14 上传
2021-08-14 上传
2021-04-21 上传
2021-05-11 上传

weixin_38613681
- 粉丝: 3
- 资源: 933
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
